
Andrew Myers
SYSTEMS INTEGRATION LEAD

Gillian Watts
tESTING lEAD

Omeed Djassemi
SOFTWARE LEAD

Sabrinna Tan
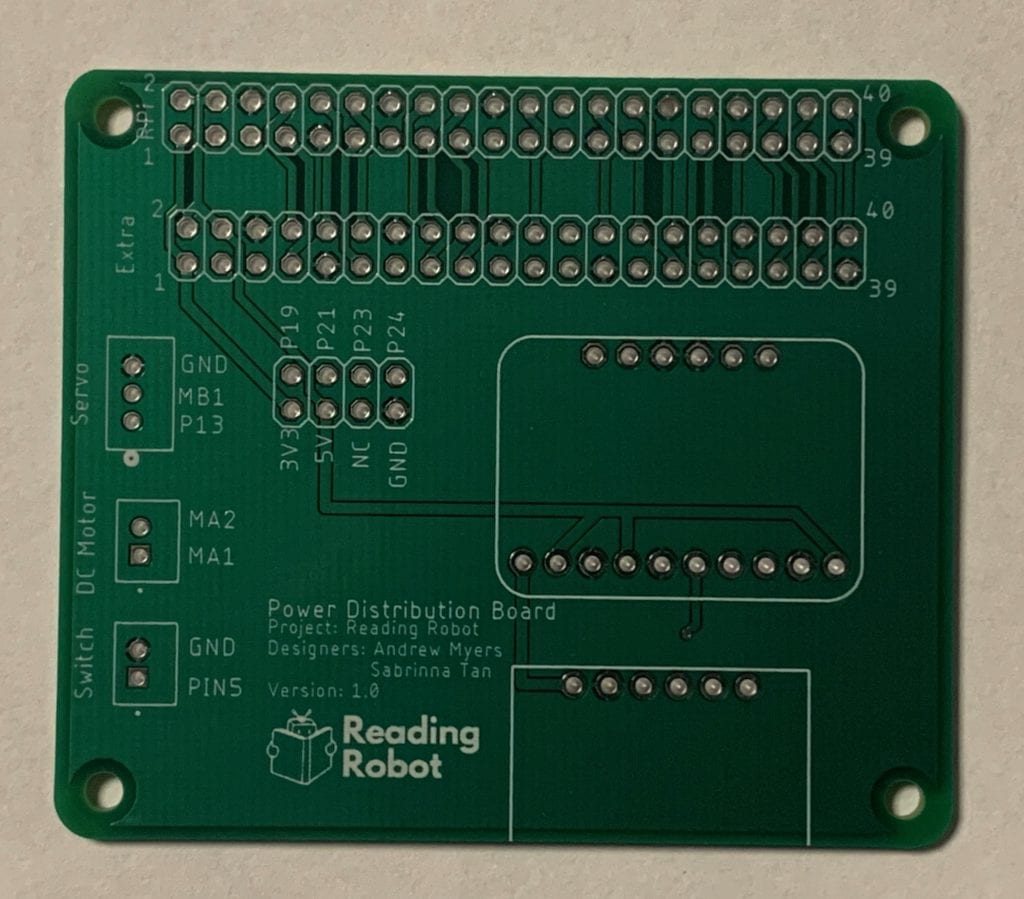
ELECTRICAL LEAD

Taylor Klein
Mechanical Lead
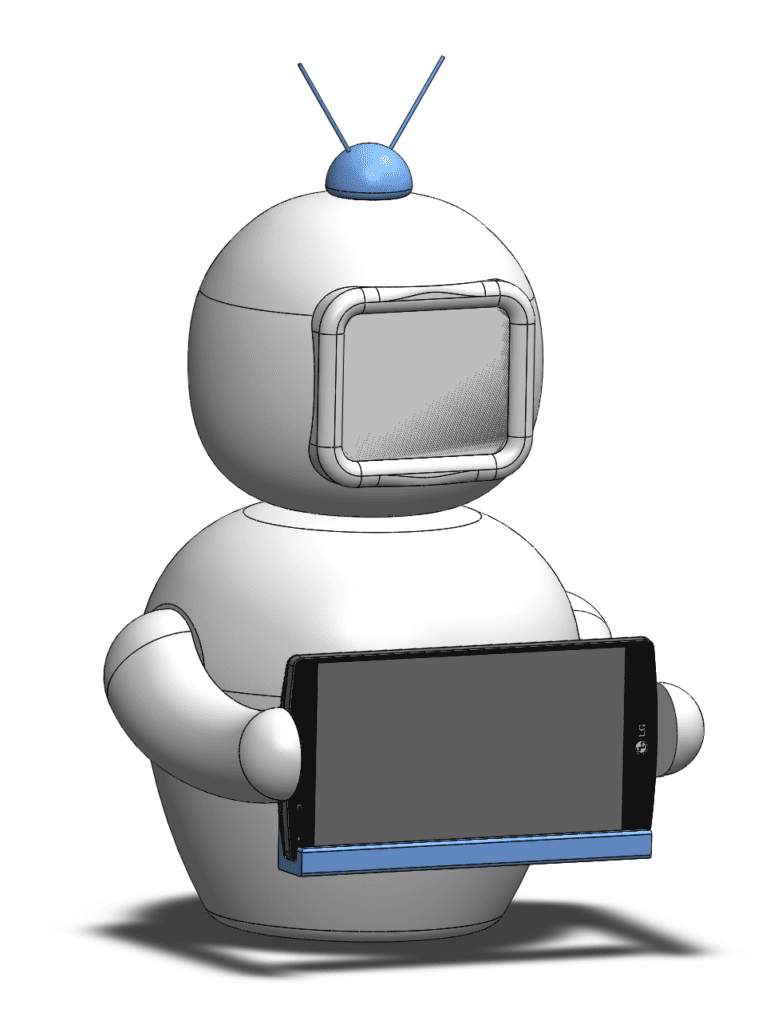


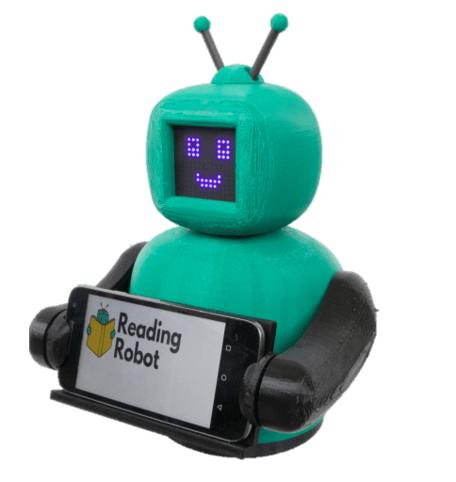
Process Flow:
- Robot introduces itself and “Begin Reading” button appears.
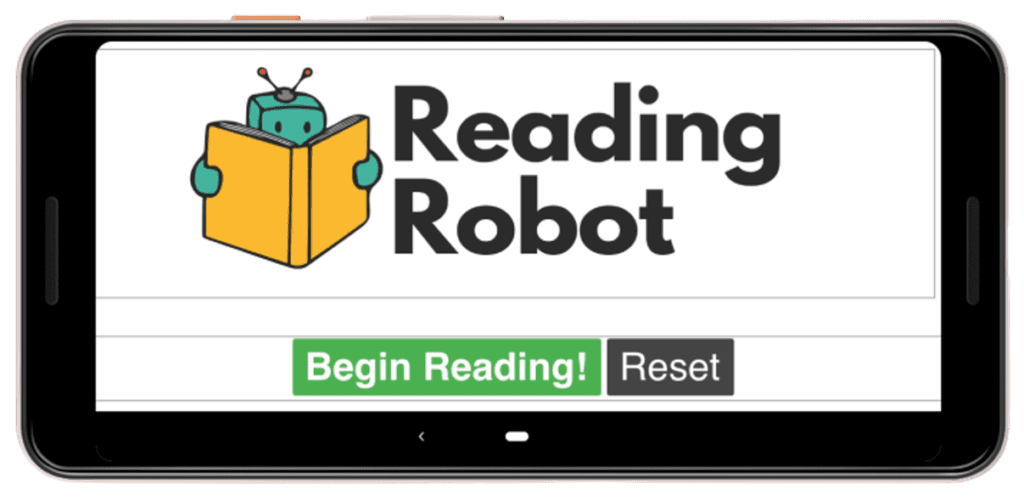
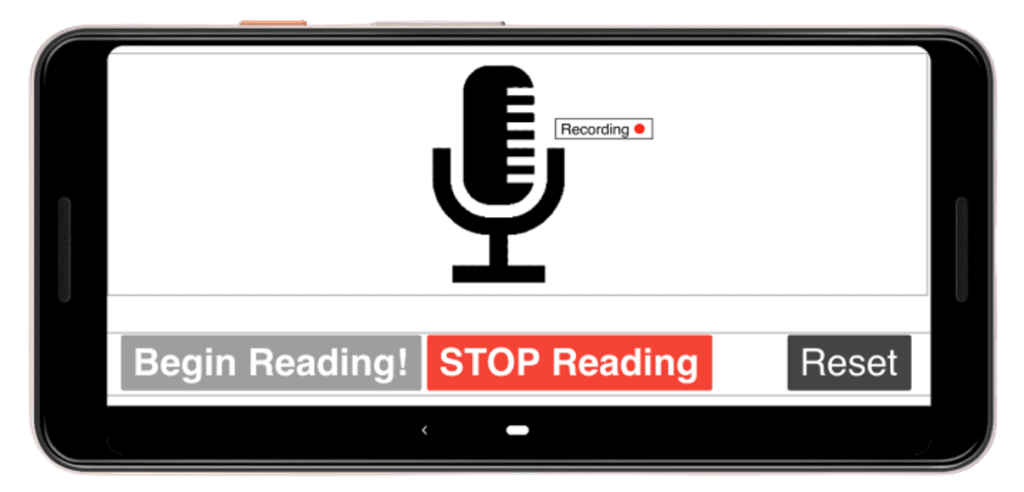
- Child presses “Begin Reading!” and reads passage aloud to the robot.
- App records and saves audio.
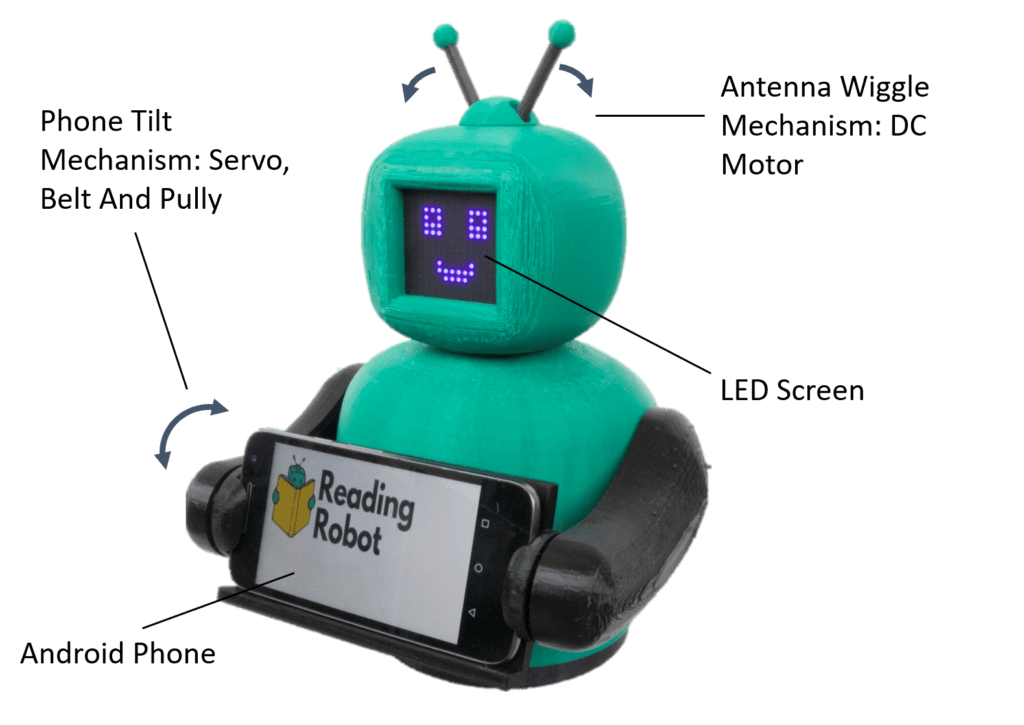
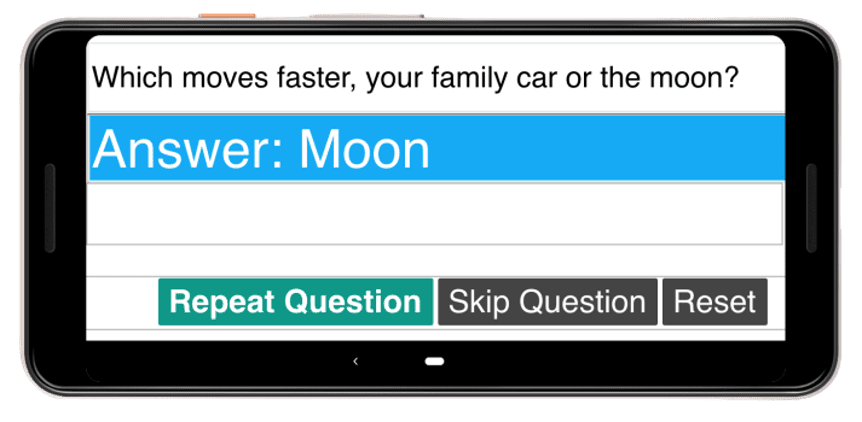
Robot asks child questions about the reading, the phone tilt and an audio cue is used to prompt child to speak.

- Correct Answer: LED face smiles bigger, antenna wiggle, “Great work!”
- Incorrect Answer: LED face neutral, Robot repeats question, answer displayed after 2 tries.


Sponsors: Dr. Jillian MccArthy & Dr. Eric Espinoza-wade

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}