
Justin Syracuse
Donald Syracuse

Chris Ewert

Jason Kehl
Design 1: This design utilized a large rectangular base with a rotating bar in the front for tilt, and wheels to adjust azimuth. The panels would be secured in place by several brackets that would mount to the back of the panels.

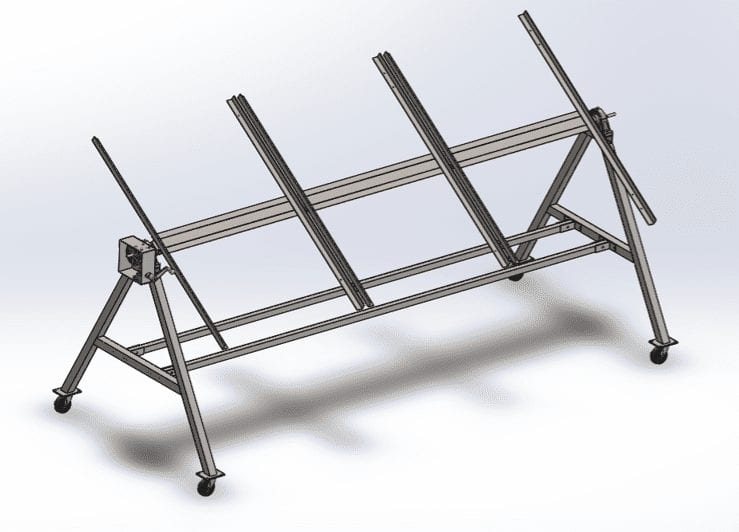
Design 2: This design has an A-frame base that ensures stability, resembles a sawhorse design, and large clamps to fasten the panel to.

Design 3: This design is a single tripod for a base. The legs are stationary, and the azimuth adjustment uses a large bearing as opposed to wheels.



The rotating cross member was analyzed extensively through hand calculations and finite element analysis to determine the structural stability of the mount in both normal operating conditions and severe wind conditions. A 3 in square cross section of 1/8 in thickness was chosen as it verified minimal deflections in both circumstances. In 90 mph wind conditions (max load) the deflection was 1 in.

The geometrical properties of the A-frame were designed to allow for the full range of tilt specified in the design constraints.
Support Frame

- Various size carbon Steel tubing
- Provide overall stability and durability to design
- Two cross members reduce vertical torque
Mounting Brackets

- Various size angled Carbon Steel
- Direct interface between panels and rotating bar
- Manufactured specific to panel dimensions
Rotating Bar

- 3″ Carbon Steel tubing
- 1/16″ thick
- Holes drilled along the bar to interface with mounting brackets
- Solid steel inserts at each end to interface with pillow bearings
Gearbox and Crank

- Provides increased panel tilt accuracy
- Four gear system
- Overall Gear Ratio: 120:1
- One crank rotation = Three degrees panel rotation

The Gearbox utilizes a four gear mesh and three different types of gears. The mesh includes
- 60:1 Spur gear to Worm gear
- 2:1 Vertical Bevel to Horizontal Bevel
The overall gear ratio was chosen based on the desired 1° tilt accuracy of the panels. This 1° tilt corresponds to 1/3 of a crank turn. The crank location was decided upon by ergonomic principles and the front face will be transparent acrylic to allow students to understand basic gear analysis.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}