

Blake Carbonneau
mechatronics lead

Pouria Fariborzi
project manager

Max Lafavour
Manufacturing Lead

It became clear to us early on in the initial design process that we would have two functions that we needed to focus on: the hitch angle measurement and the trailer length measurement.
Both of these functions would require a method for measuring a value without being able to physically touch the thing that they were measuring. Because of this, we settled on sensors to measure distances and using those distances to calculate the desired values.

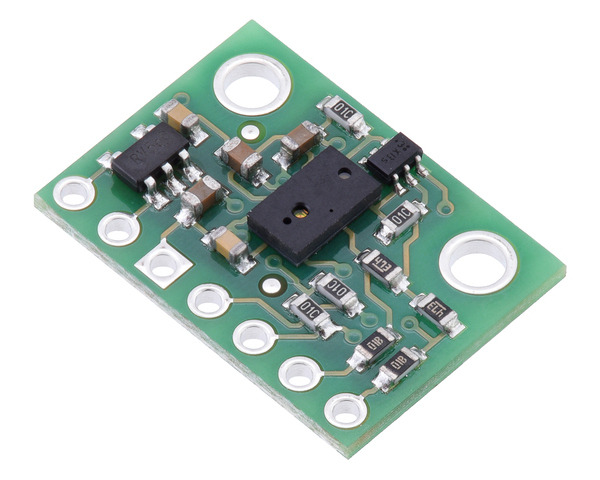
We used this decision table to determine which sensors we would use and decided on using Time-of-Flight (ToF) sensors, a smaller, cheaper version of 1D LiDAR.
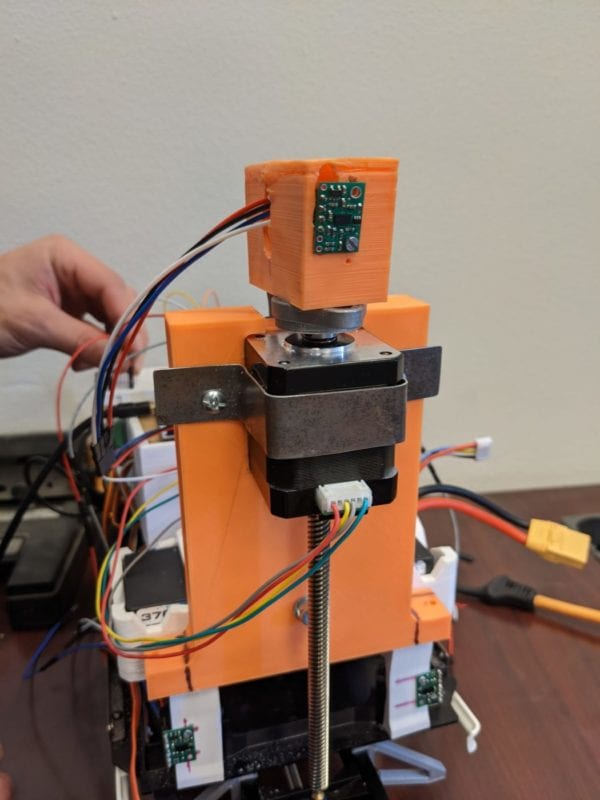
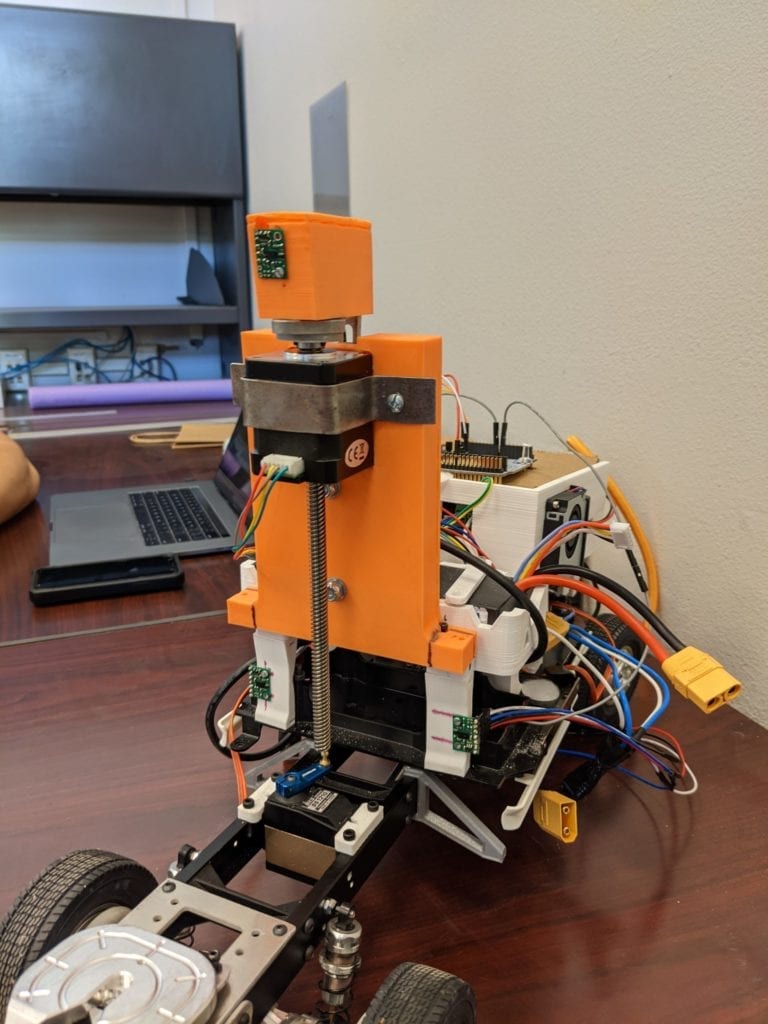
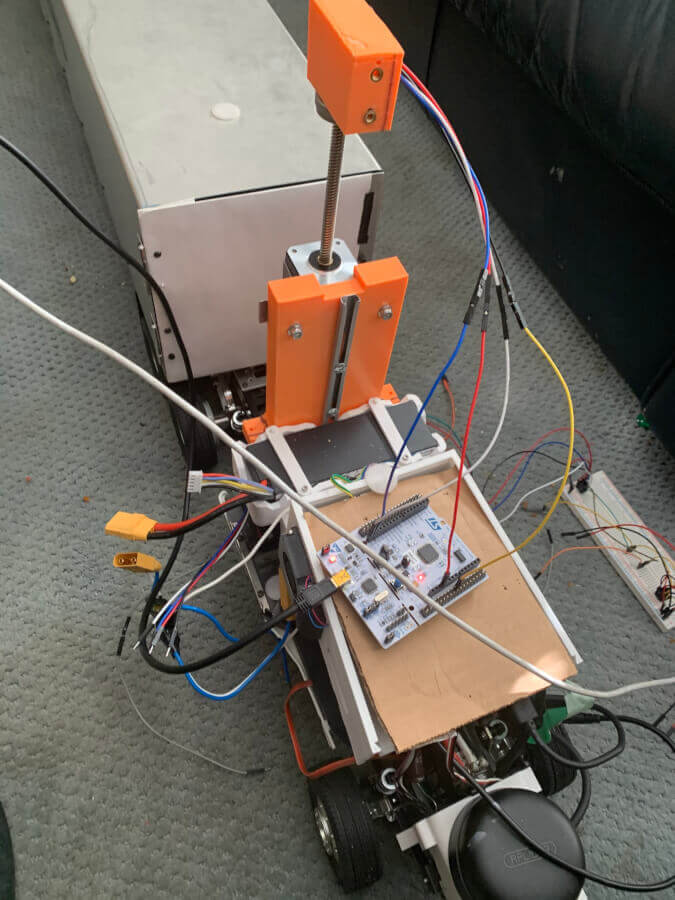
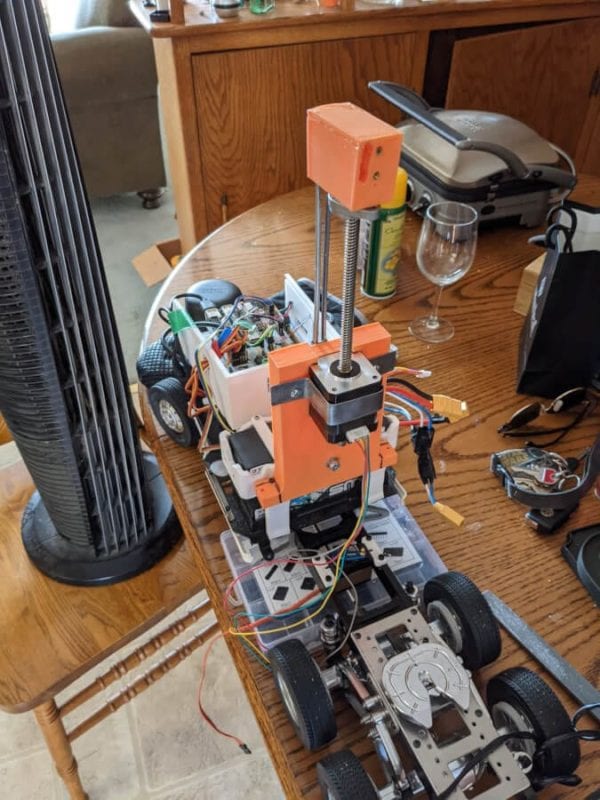
To measure trailer length, a potential solution was to take measurements with a distance sensor to avoid placing any components on the trailer. To accomplish this, we had to design a component to raise the sensor beyond the tractor profile then lower it before the journey takes place.
Cal Poly College of Engineering
This project is sponsored by Dr. Charles Birdsong of the Cal Poly Mechanical Engineering Department
In Conjunction with: 
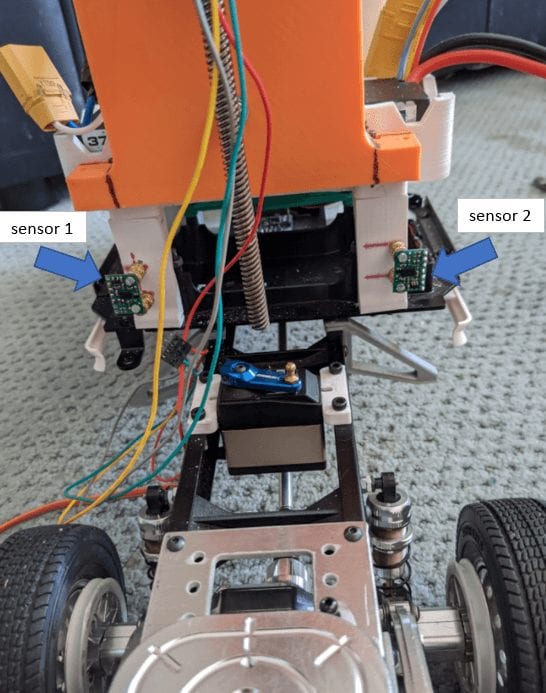
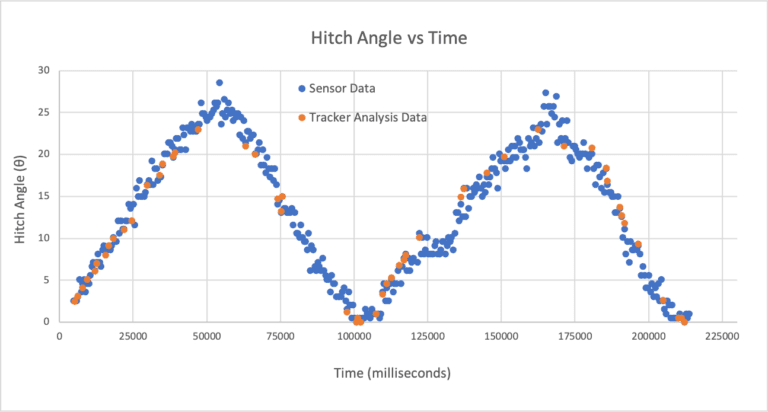
The angular position system had the primary task of outputting the hitch angle (angular position) and the angular velocity of the trailer. 
The result was a very simple physical system consisting of two distance sensors, one mounted toward the left of the tractor, and one mounted toward the right of the tractor, which would measure the distances from each sensor to the face of the trailer. As the trailer angle changes, the difference of the distances would be used with trigonometry used to calculate the angle. A derivative function is then used in the microcontroller to get the angular velocity.
Solution Components:
- two ST VL6180X ToF sensors
- 3D printed motor mount
- intended to hold the motor in a milled pocket
- mount is fitted to the tractor’s existing superstructure
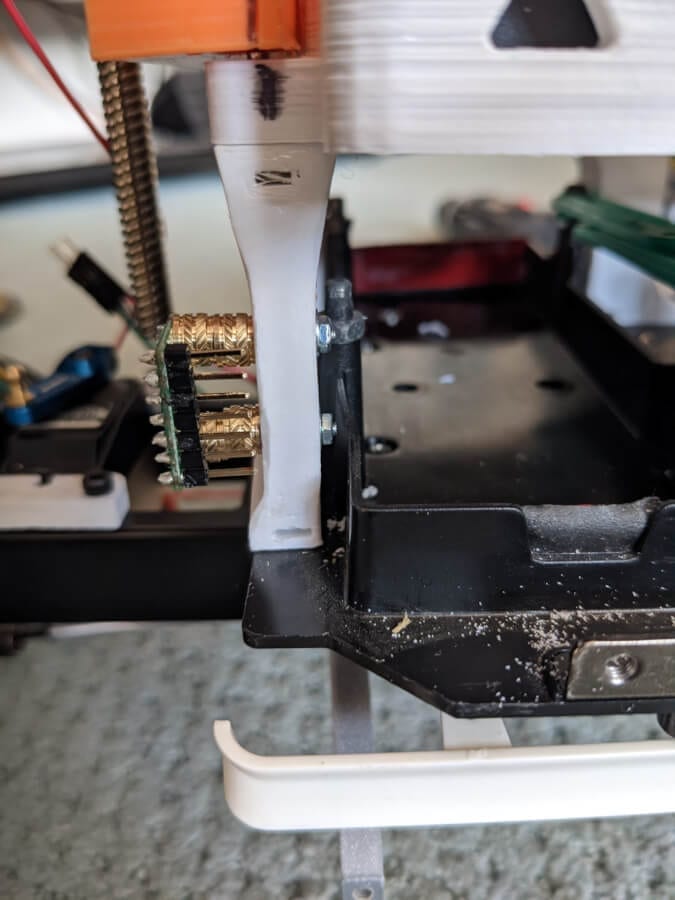
- 3D printed sensor mount
- fixes the sensor at 7.5°
- sits atop a bearing to prevent the mount from rotating with the shaft
- motor bracket
- 18 gauge sheet steel that was cut into a strip, bent, and drilled to hold the motor
- metal sliding rail
- attaches to the back of both the sensor mount and motor mount in order to keep the sensor pointing straight while translating
- slot machined up the middle of the inner piece to accommodate the mounting screws
Software Flowchart

This is the final flowchart showing how the functions were implemented in software on our microcontroller.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}