

Sara Passantino
Shipwreck sara

Thomas Smith
Tidepool thomas

Casey Smith
Coral Casey

Andrew Noble
Anenome Andrew
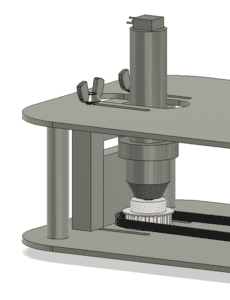
The Initial Carousel Concept Sketch:
- Allows for discrete sampling
- Compatible with motor MARE already has
- Fits within the designated space constrains
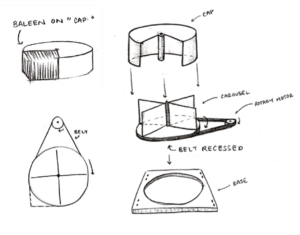
- Geared carousel bottom to drive the system via a motor and belt
- “Baleen” bristles to trap samples entering the container
- 4 discrete sampling locations provided by rotating dividers
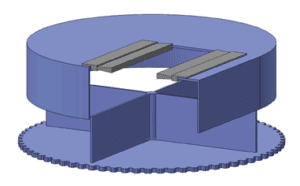
Concept Prototype:
- Added slots on the partitions to allow for easier movement in a submerged environment


This project is sponsored by Marine Applied Research Group (MARE)
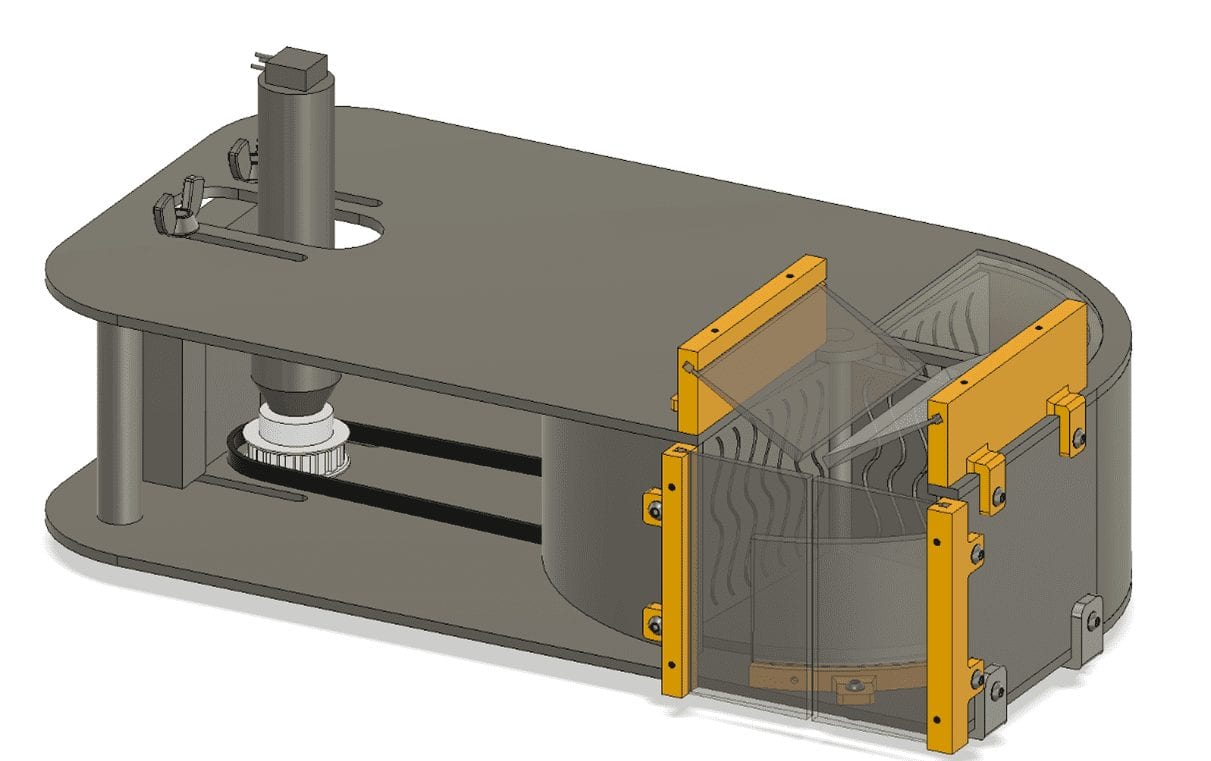
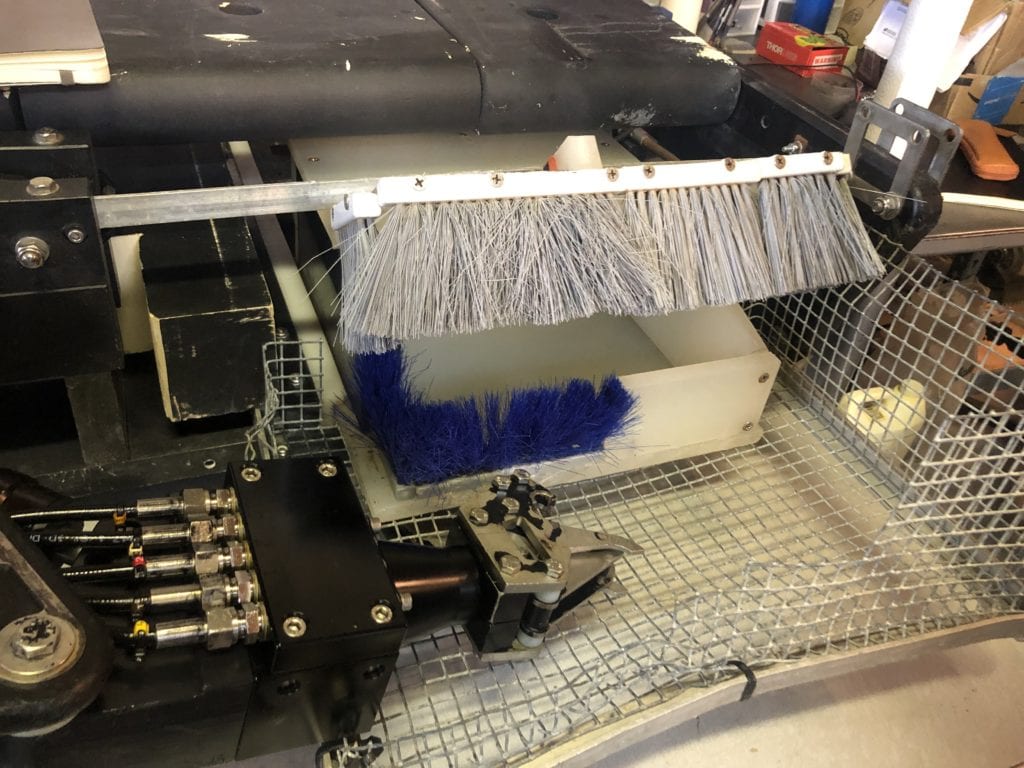
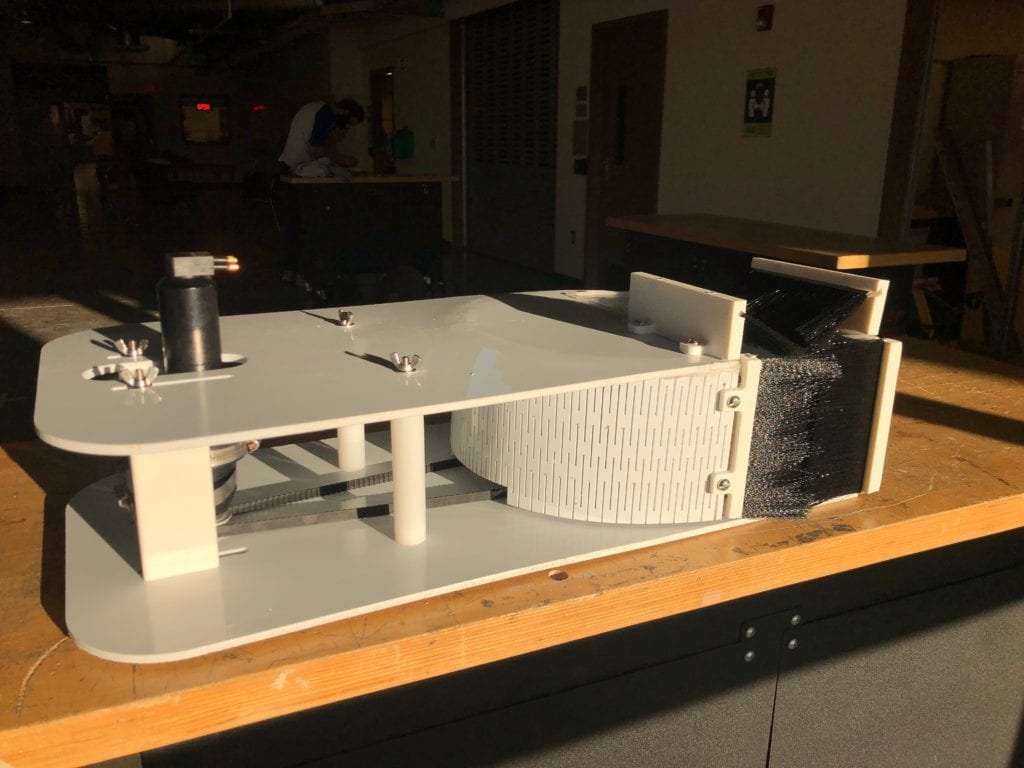
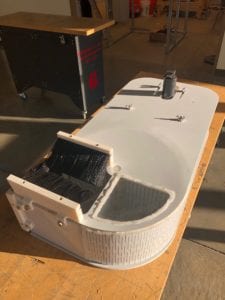
The Entry System:

The entry system is designed to receive and capture the sample placed within the system by the manipulator arm. Four “baleen” brushes, secured at an inward sloping angle, act to easily allow the manipulator arm and sample to enter the system, while making an exit from the system difficult for the sample. This system has been lifted from the top surface to make the sample deposit easier and assure that the brushes will not contact the internal rotating component. Due to expected wear and tear, the brushes will be modular and replaceable for easy maintenance.
The Lid:
The lid system is used to capture the rotating system and provide a means to secure the overall system to the skid on the ROV. The lid consists of the top “plate” and the curved surface that closes the system. This system also includes an acrylic window, allowing for the viewing of the sample as they enter the container.
The Carousel:
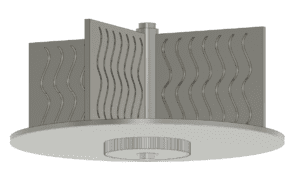
The carousel is the rotating component of the overall system, working to move a sample placed in the container to the secured area under the lid for storage. The carousel is spun by a belt-driven gear secured under the carousel’s bottom circle. The carousel consists of four slotted partitions that allow for discrete sampling while letting water pass through them to ease the torque put on the drive system when the system is submerged.
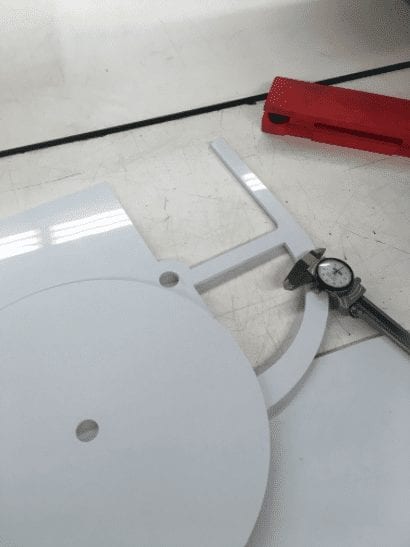
The Base:
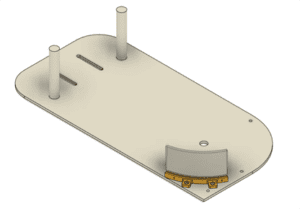
The base subsystem remains fixed relative the general system, capturing the rotating carousel with a locating hole that the stepped shaft from the carousel will rest in. The base also acts as half of the tensioning mechanism for the driving belt.
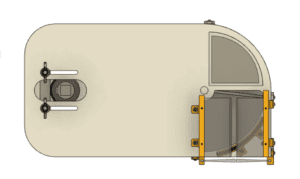
The Drive System:
The drive system consists of the motor supplied and marine-proofed by MARE, an off the shelf flanged drive pulley, an off the shelf 3/8th inch geared belt, and the waterjet -cut driven pulley which is attached to the carousel. The motor is connected to the electrical system onboard the ROV Beagle and controlled by a simple switch on board the vessel the ROV Beagle is tethered. The motor turns counterclockwise when it receives a positive voltage input from the controller and turns clockwise when it receives a negative voltage from the controller. This allows for the system rotation to be easily controlled by the ROV controller.
Tensioning in the belt of the drive system is accounted for by securing the motor to the back plate via a hose clamp, then moving the motor assembly back within the corresponding tensioning slots on the lid and base. When the belt is properly tensioned, the assembly will be tightened in place by wingnuts, making for easy adjustment.
- Custom Components
- Polypro structure


- Motor mount

- Brush holders

- Base gear

- Fasteners
- Belt and pulley
- Hose clamps