Our Team
Hello! We are a team of 4th year biomedical engineering students initially interested in the implementation of gyroscopic concepts in device design.

Ella Mahood
Project manager/ux lead
After a type 1 diabetes diagnosis 2 weeks before my 11th birthday, I made it my mission to help others as they have helped me. Since then I’ve acted as team lead on projects ranging from a voice-activated paintball gun for quadriplegics with QL+ to a new CGM inserter with Ascensia Diabetes Care. For this project I wanted to make it a little easier for the millions afraid of falling walking across a room and especially for John, a close family friend.

Jason Provol
mechanical design lead
This project was an excellent opportunity to learn and apply skills in research, design, data analysis, and product development. It was fun to work with my peers on a hands-on design project. I hope that our learnings can help advance the care for balance impaired individuals.

Raymond Tseng
mechanical research lead
In my opinion, gyroscopes have always been one of the most fascinating and unintuitive aspects of physics. This project presented me with the opportunity to learn more about them and brainstorm methods to utilize gyroscopes in helping people stand on their own two feet again.
Acknowledgements
We would like to give many thanks to our friends and family for their help and encouragement along the way, our senior project advisor Dr. Britta Berg-Johansen, the Cal Poly Biomedical Engineering Department, and a special thanks to our sponsor Charlie Gutierrez for his endless stories and ideas.
Digital Poster
This project is sponsored by Charlie Gutierrez, owner of LiftWalker.
Introduction
There are currently no low-cost solutions for hands-free restorative therapy devices intended for patients transitioning from a fully restrictive bracing, like a wheelchair, to fully walking. The true patient population that could benefit from this device is unknown, however according to our sponsor Charlie, it is estimated that 70% of patients in wheelchairs would show balance improvement and potential to walk again if such a device existed. There are many pathologies that lead to balance impairments including partial paralysis, multiple sclerosis, and conditions of the inner ear.
Existing Devices
{kind=link}
{kind=link}
{kind=link}
{kind=link}
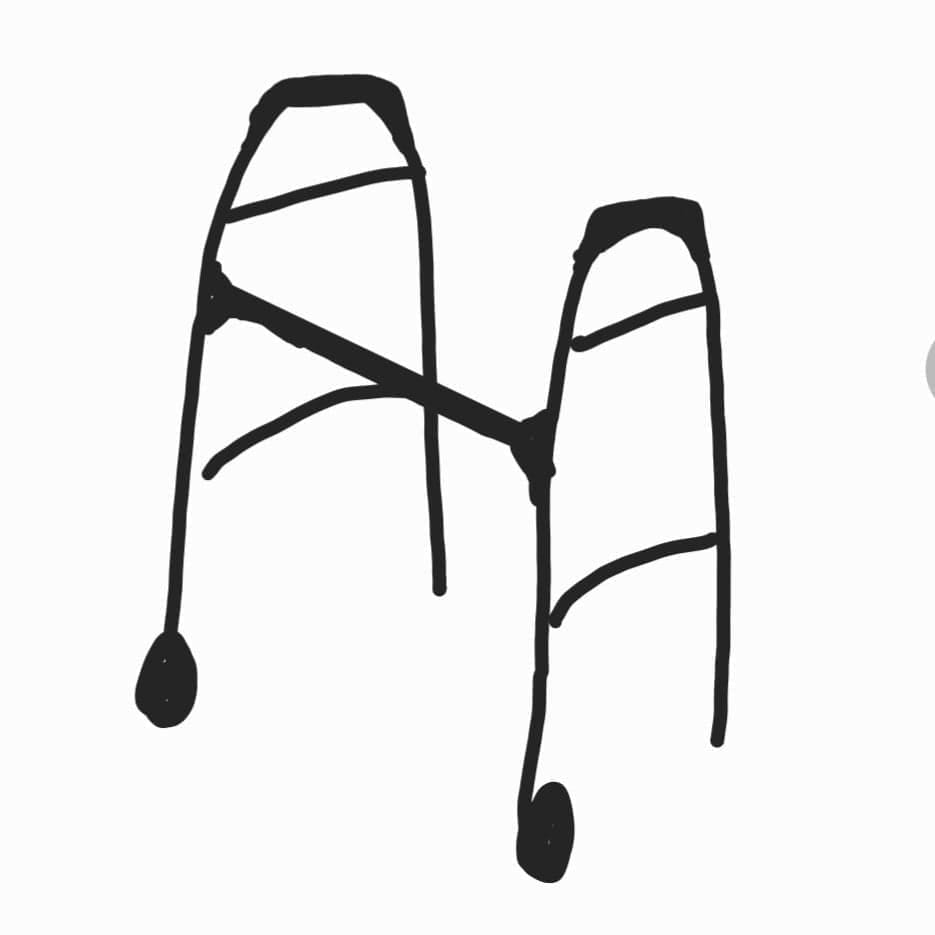
Figure 1: Top: Low-cost balance aid devices include walkers and canes, however these can be cumbersome to carry around. Bottom: Wandercraft’s Atalante self- balancing exoskeleton [1], which is incredibly expensive and TUDelft’s gyroscopic balance assistance backpack patent we worked around [2], which has yet to go to market.
Design Requirements
Indications for use
The flywheel fanny pack balance assist is indicated for use on patients of any gender with a weight greater than 100 lbs, and height greater than 4′ 6″. Such patients might suffer from balance impairments which could be helped by a rehabilitative device providing an informational push to the upright torso position for self-correction. Balance impairments could be due to, but not limited to: inner ear issues, neurological issues, or brain injuries. These patients should be transitioning from devices such as a wheelchair or walker to unassisted walking and must have adequate motor function and strength to propel themselves into a stand and a walking gait.
CUSTOMER requirements
Our sponsor Charlie is our primary customer that has designated several basic requirements including:
- use of a gyroscope
- a wearable device
- a creative design
- easy usability by an example patient named Freddie
Freddie is described to have success in walking short distances and is ready to feel more independent. The second primary customers include patients like Freddie who have various balance impairments and have requirements such as:
- easy to use
- comfortable, especially low weight
- adjustable for different users and abilities
- low-cost
- safe
Engineering Specifications
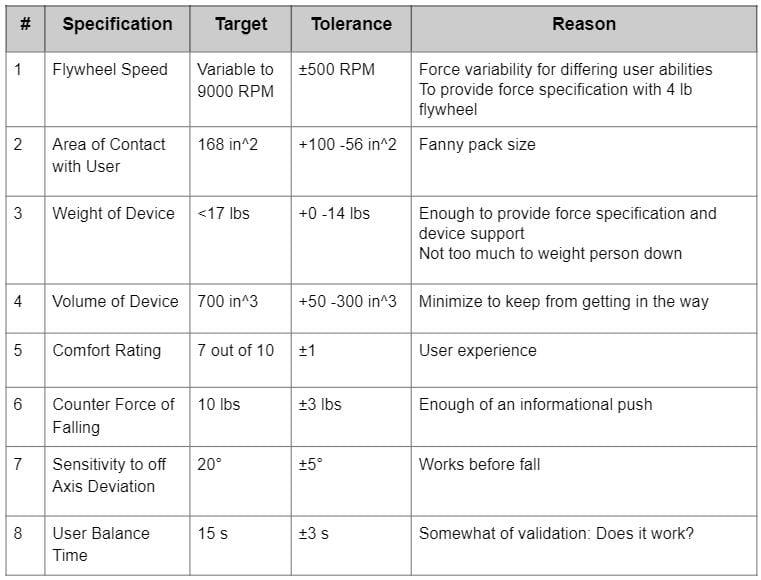
Table 1: Developed engineering specifications. These will serve as metrics by which we determine the success or failure of the device.
Design Overview
We began the design process by drawing concepts to suit the requirements laid out earlier. We intended for the device to be worn around the user’s belly button to provide support closest to his or her center of gravity. Initially, we had planned to include two orthogonal flywheels to provide balance in all directions, but decided to only include one due to limitations in time and resources. For the first iteration of our design, we designed the flywheel with the outer edges resembling a honeycomb so that we could fill it in with a heavier material to increase the moment of inertia. This flywheel would then be accelerated via a speed adjustable motor.
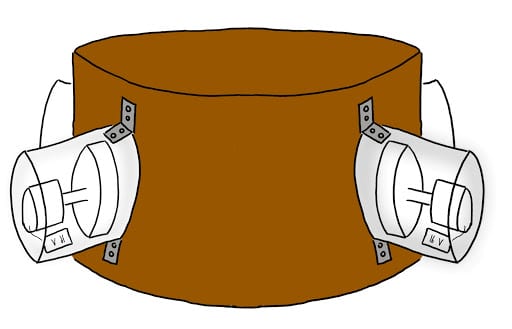
Figure 2: Early design concept drawing

Figure 3: Solidworks model of the first iteration of our prototype.
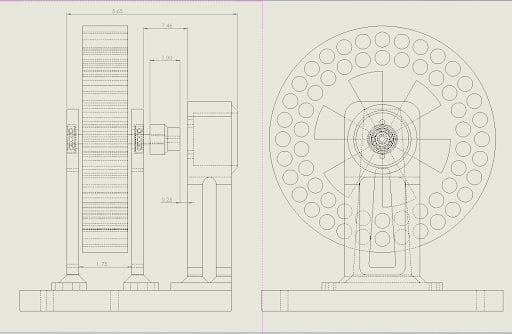
Figure 4: Detail view of flywheel and flywheel fixture for the first iteration.
Prototype Development
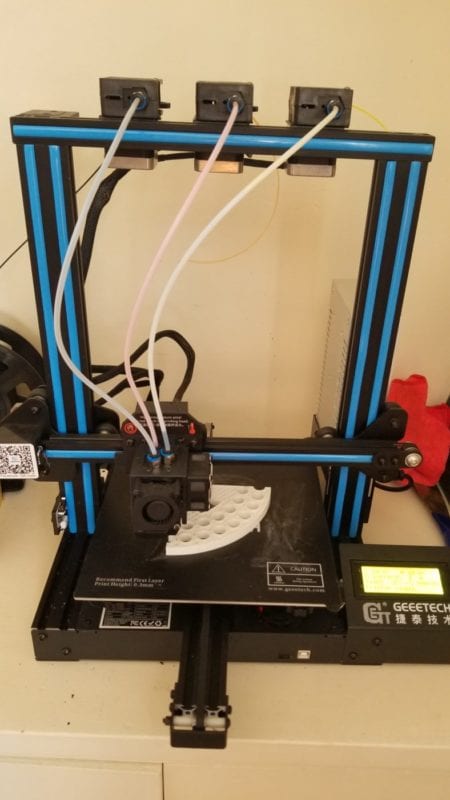
To stay under our $200 budget for our first prototype, we 3D printed a majority of the components in PLA. For adjustability we used a weight-lifting belt. After a mechanical failure due to excessive rotational speed and insufficient material properties, we pivoted to a metal flywheel. For this we had to very quickly redesign and rebuild our prototype.
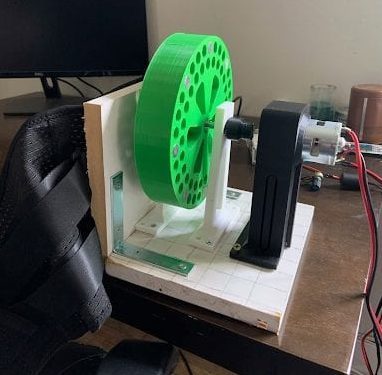
Figure 5: First prototype.
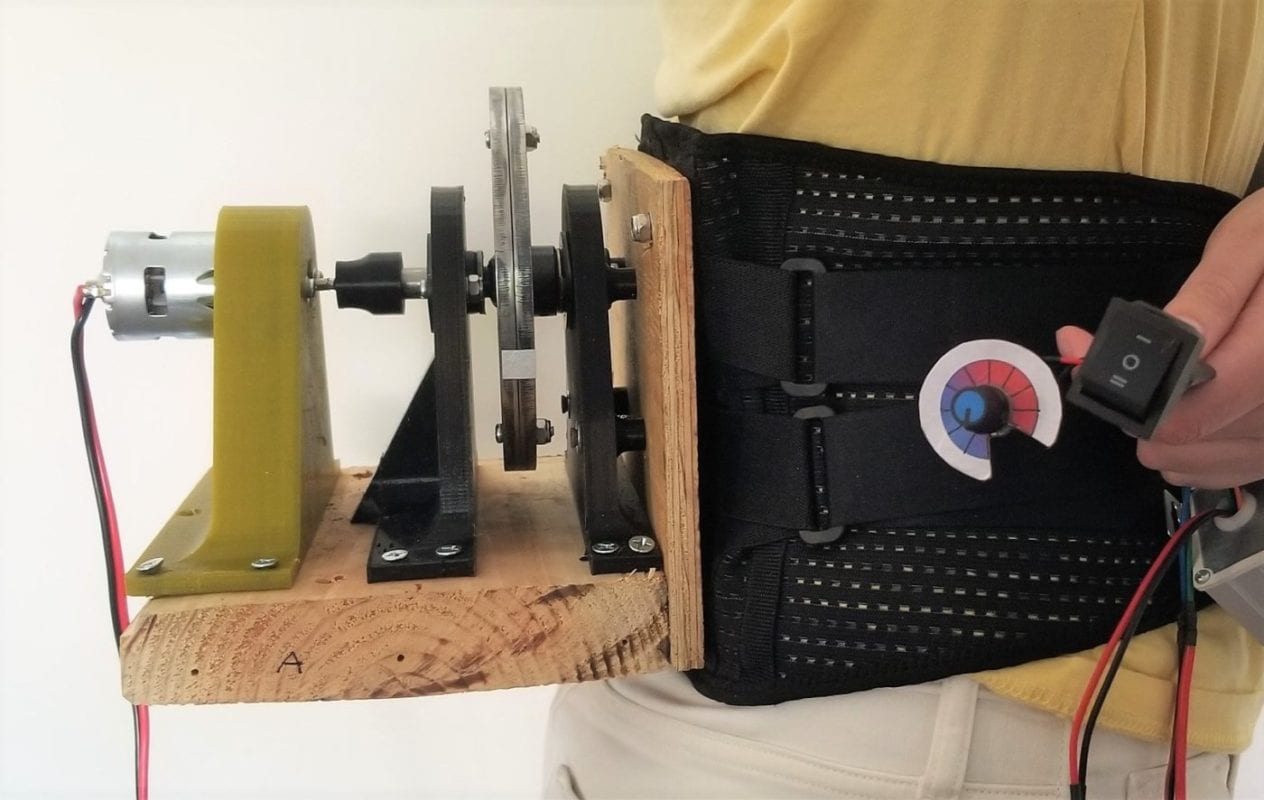

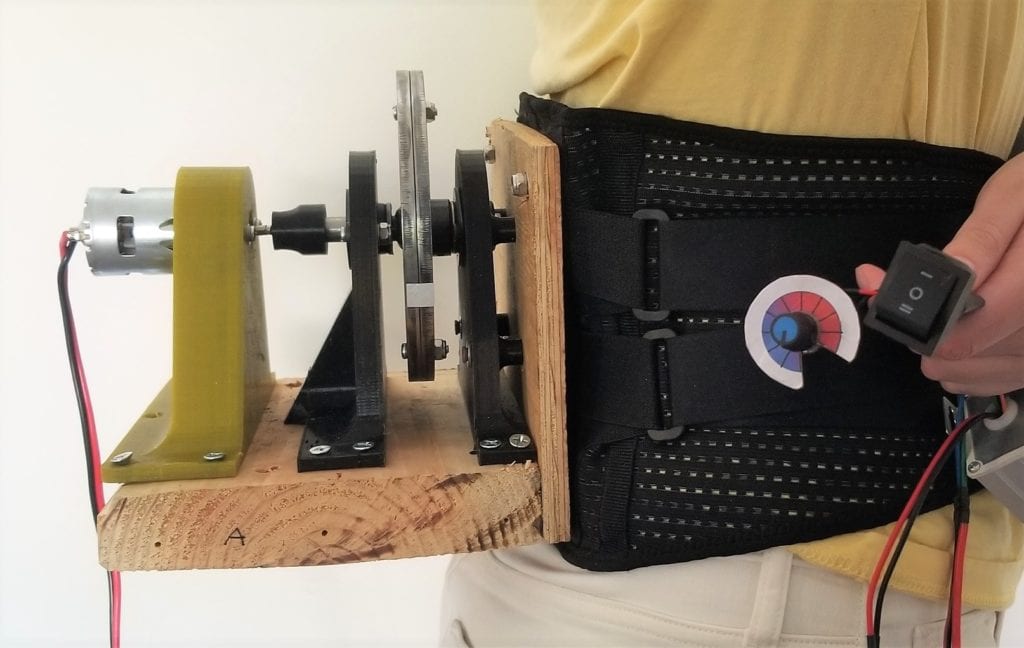
Figure 6: Second prototype. Top: Worn by a user. Below: Prototype encased in protective it’s aluminum sheet metal cover.
Verification
Table 2: Engineering specifications matched with each test we performed.
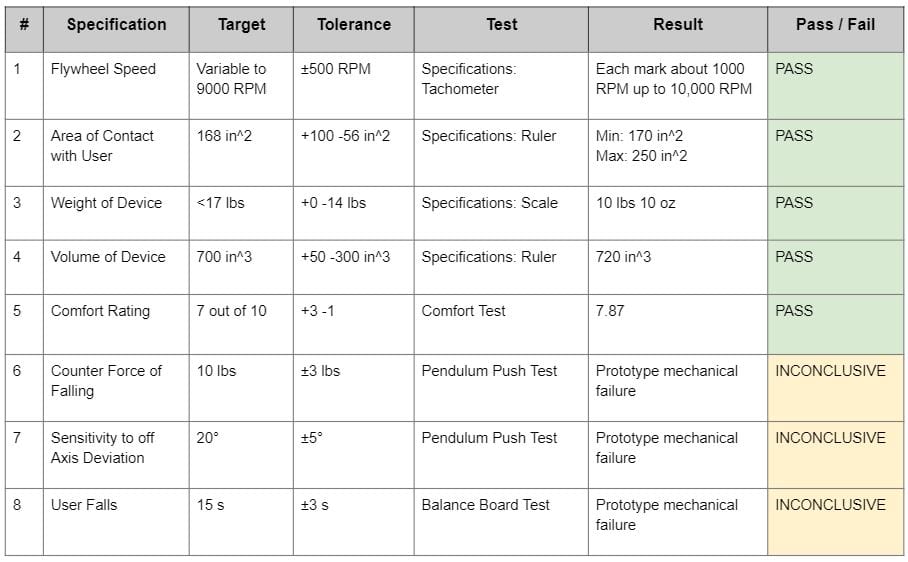
For each spec we created a test to verify and validate we met our requirements. Specification testing involved simple data verification with a scale, ruler, and tachometer. Comfort testing involved asking participants to rate wearing the device for different tasks and lengths of time. For these 5 tests we passed. Due to a total prototype mechanical failure during the pendulum push testing, we were unable to complete all our testing. However we did observe when the device pendulum was perturbed while the flywheel was spinning, that the device swayed less and returned to its original position much faster.
{kind=link}
{kind=link}
Figure 7: Left: Specifications testing with tachometer. Right: Comfort testing.
Table 3: Comfort testing results.
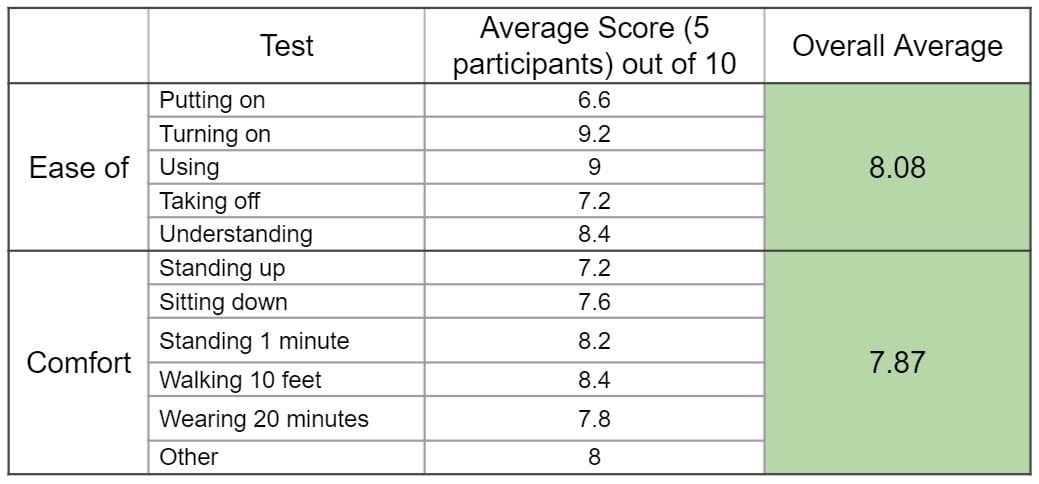

Figure 8: Pendulum push test setup. A fixed amount of weight is released from a fixed height, so a known force, which then collides with the device to perturb the system. This is done at various angular speeds of the flywheel. The angular deviation is measured as a function of time using an accelerometer.
Conclusion
Building a gyroscopic balance device proved to be to be very challenging on a low budget and with a short timeline. While there will be many iterations before a final product, the design team was successful in modeling the gyroscopic effect with a waist level mounted flywheel
future steps
- CNC support components in aluminum: allows for a much lighter, stronger, and more accurate (overall safer) prototype
- Finish testing: especially verification testing with potential balance impaired users
- Add additional flywheels: allows for multi-axis falling
References
[1] Marinov+, Exoskeleton, 2016.
[2] US20140260714A1, 2014.
{kind=link}
{kind=link}
{kind=link}
{kind=link}