
Thomas Eggenberger

Spencer Hann
Matthew Pfeiffer

Trevor Blythe

This project is sponsored by Hans Mayer and the Microfabrication Lab
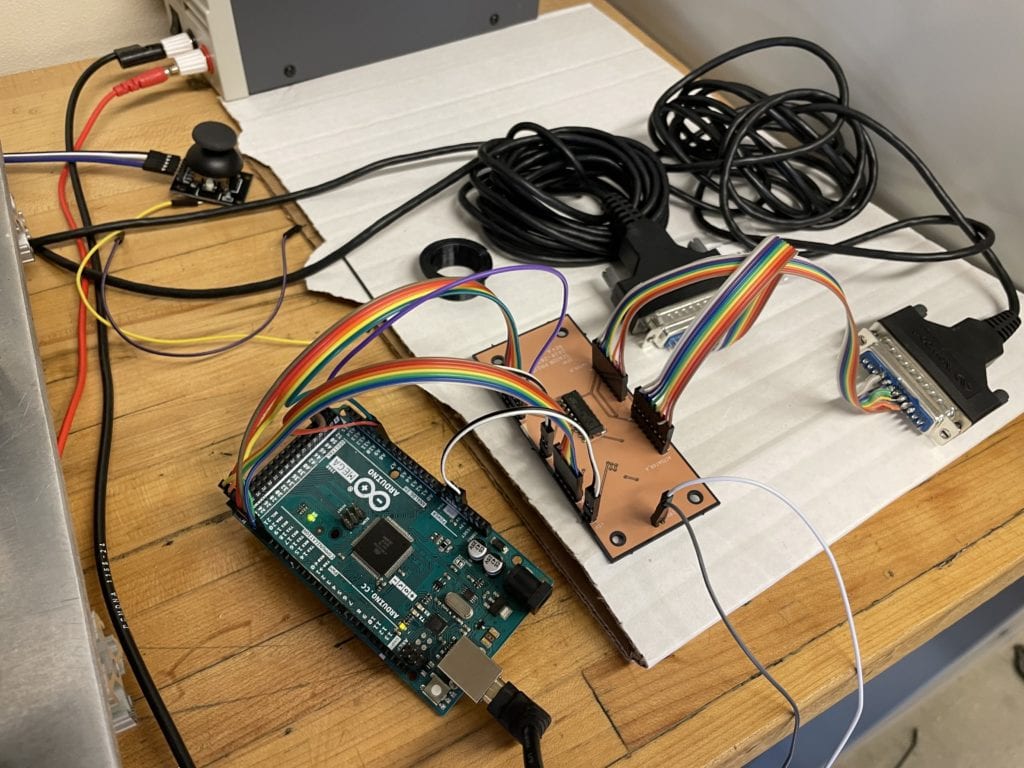
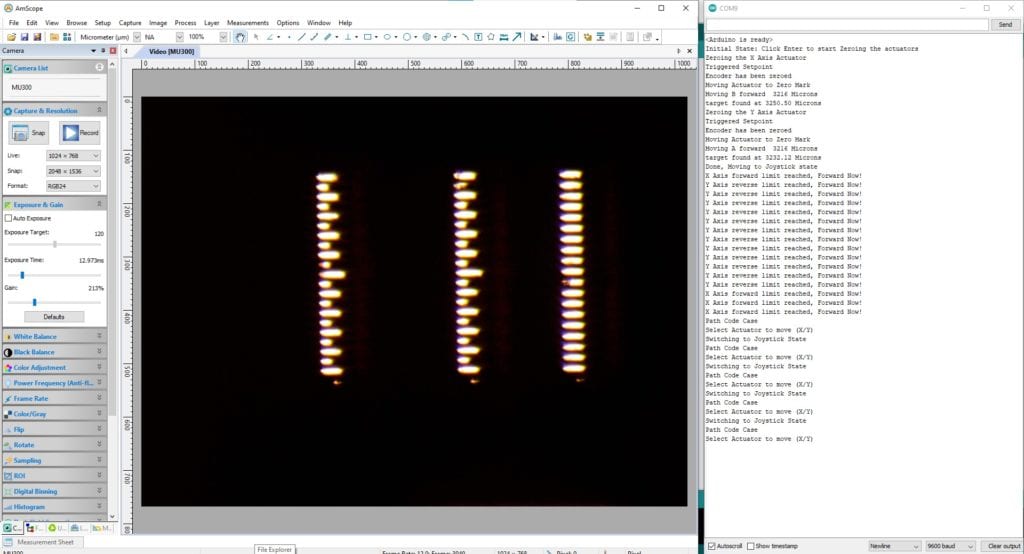
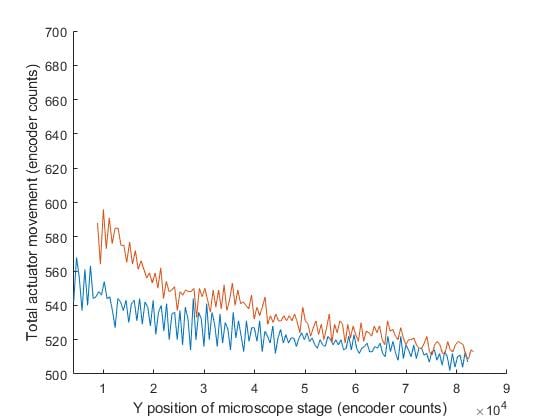
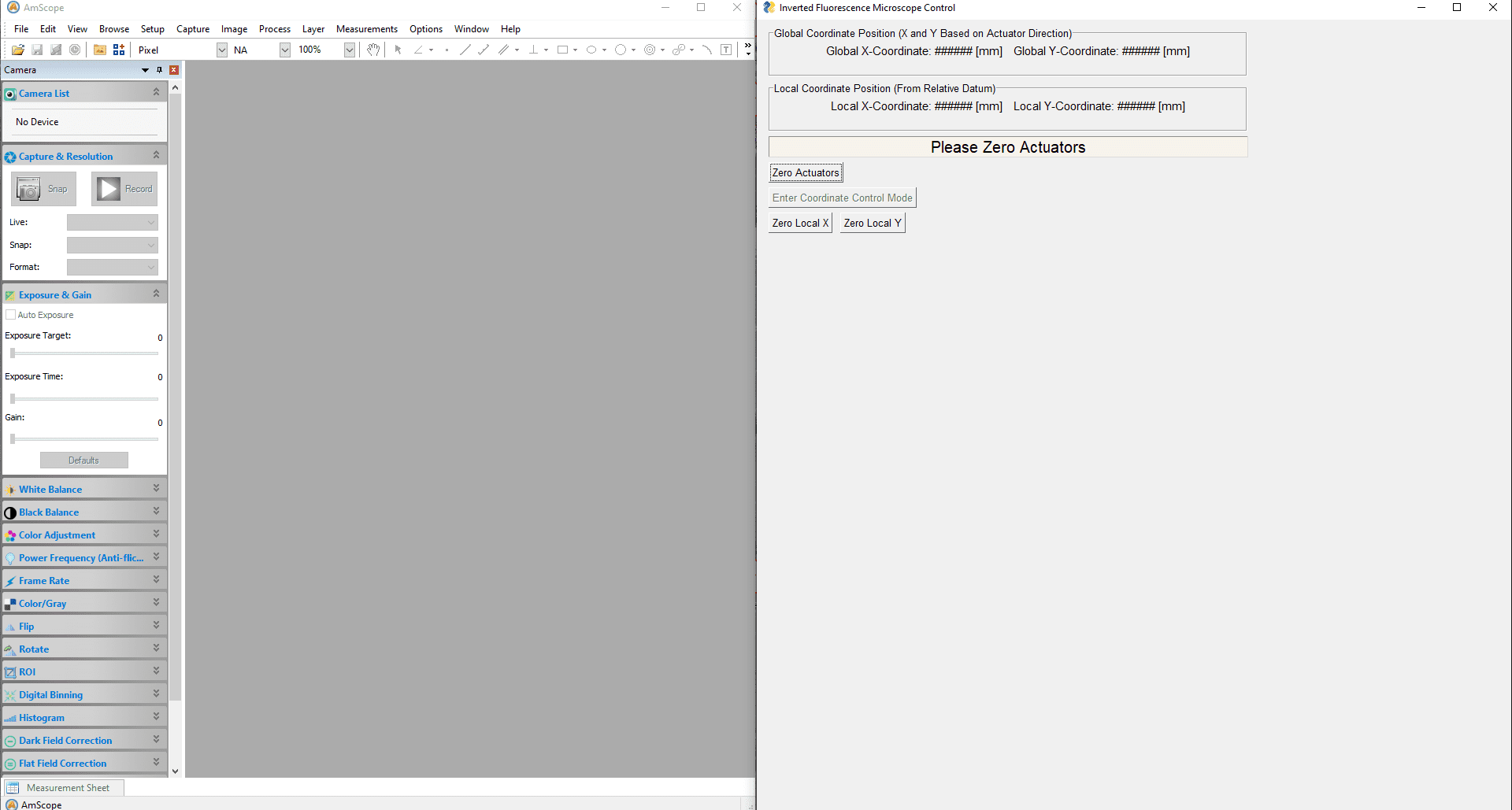
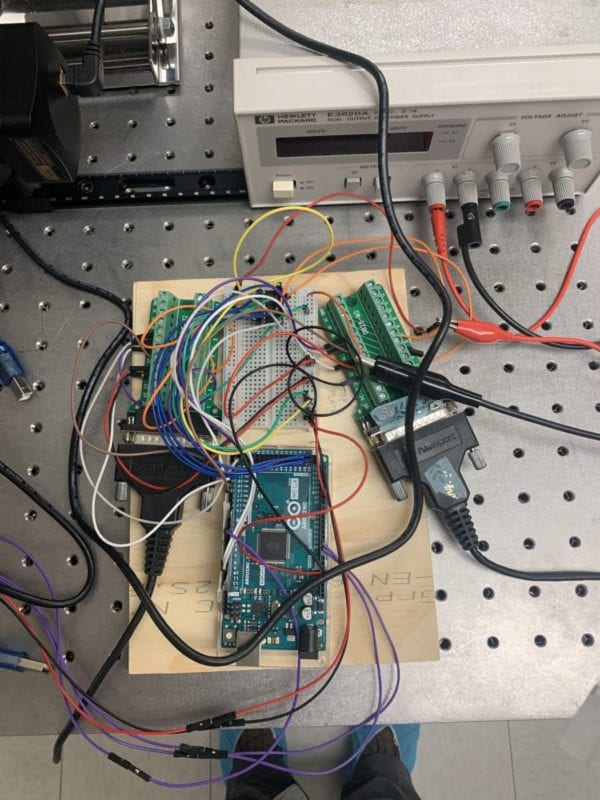
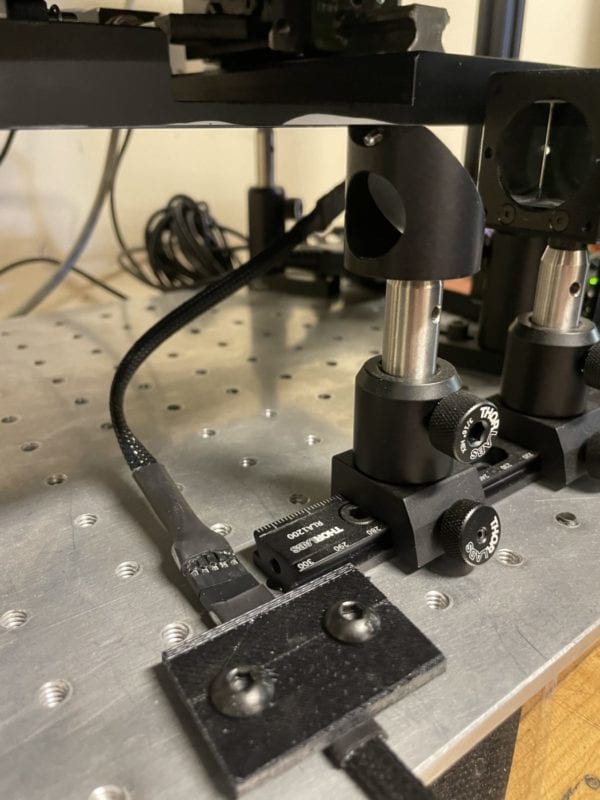
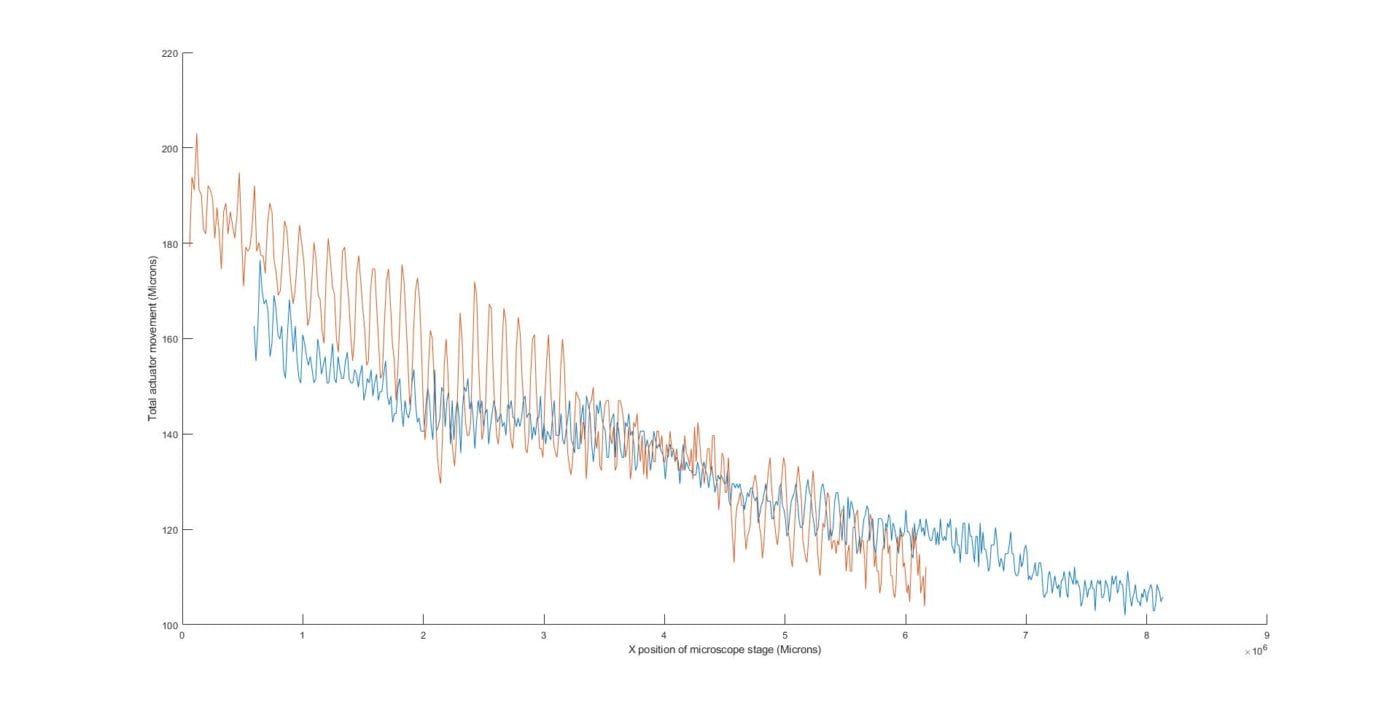
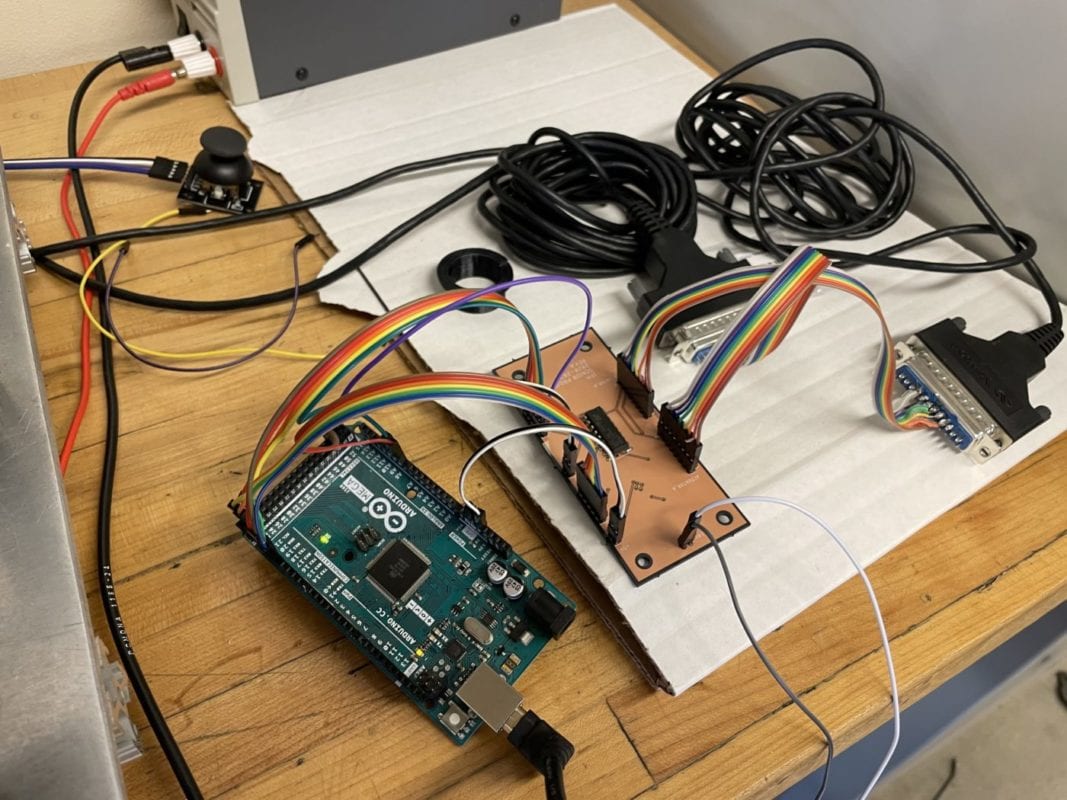
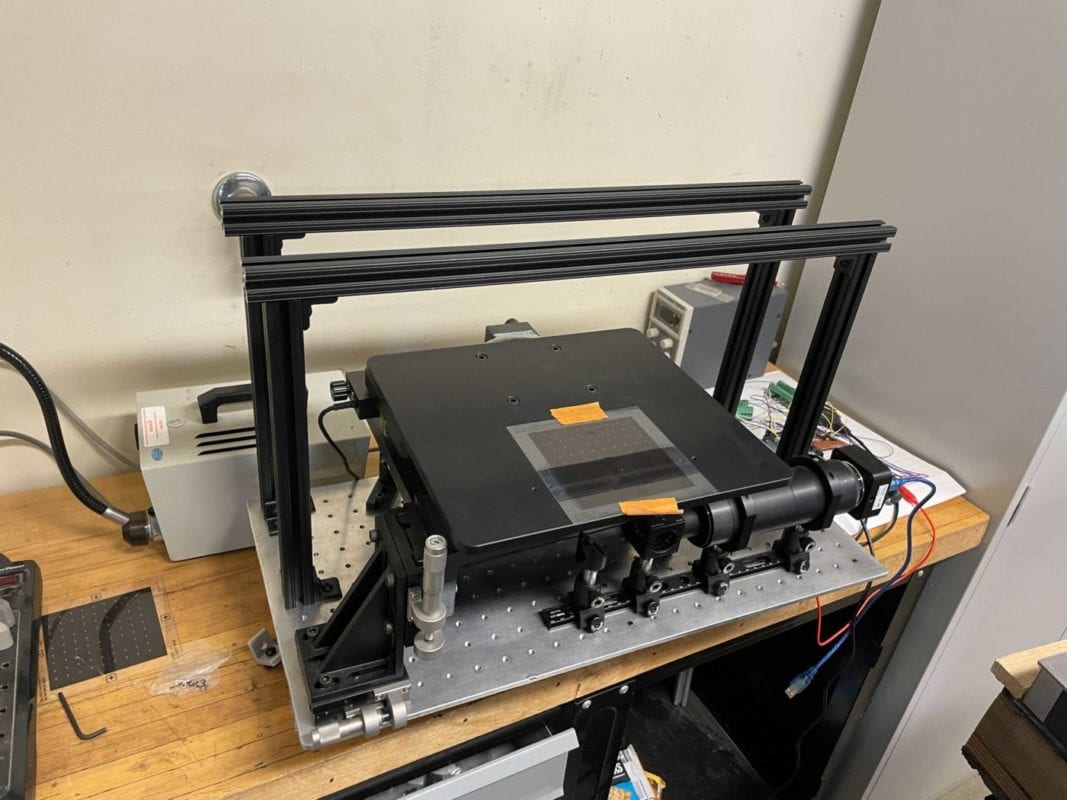
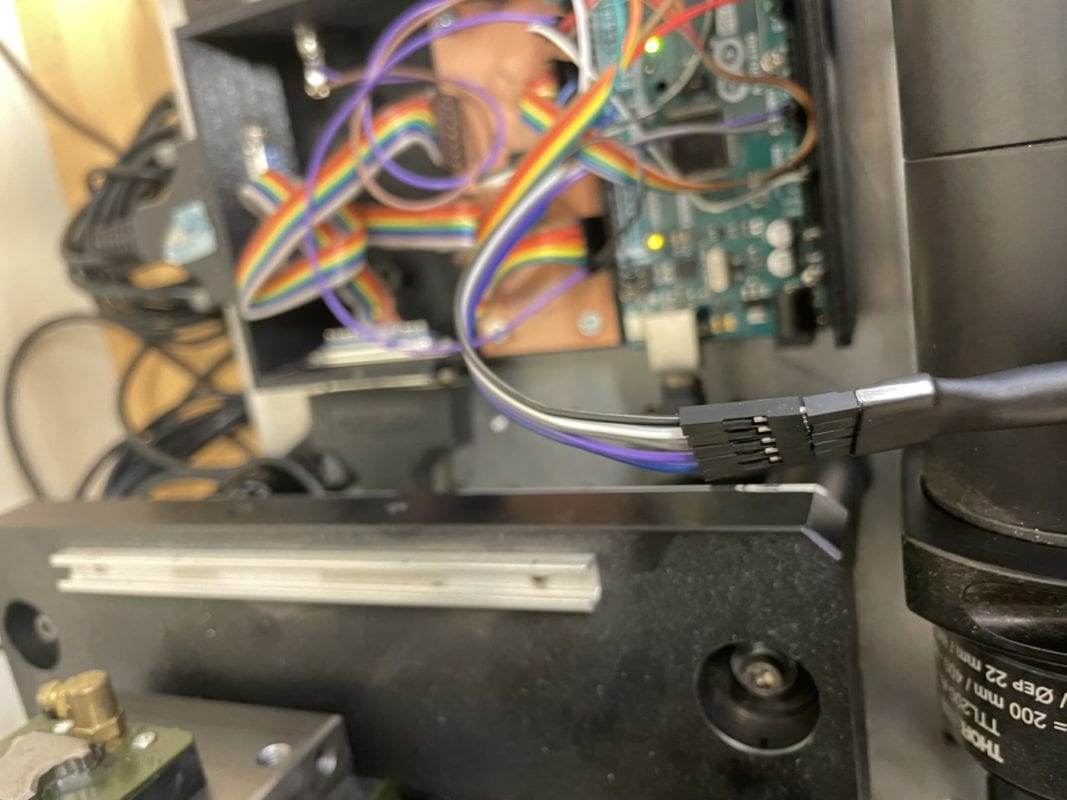
If the microscope moved along a predetermined path, and then attempted to move to the original position, there would be a noticeable difference in where it ended up. Our first task was to develop and perform a test to characterize this error. We coded an automated test program to actuate the stage a specified number of encoder counts across the entire range of motion of the stage. Then using the serial monitor of the Arduino the error was collected and analyzed
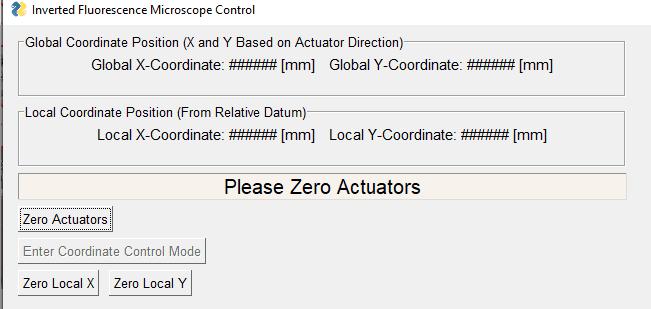
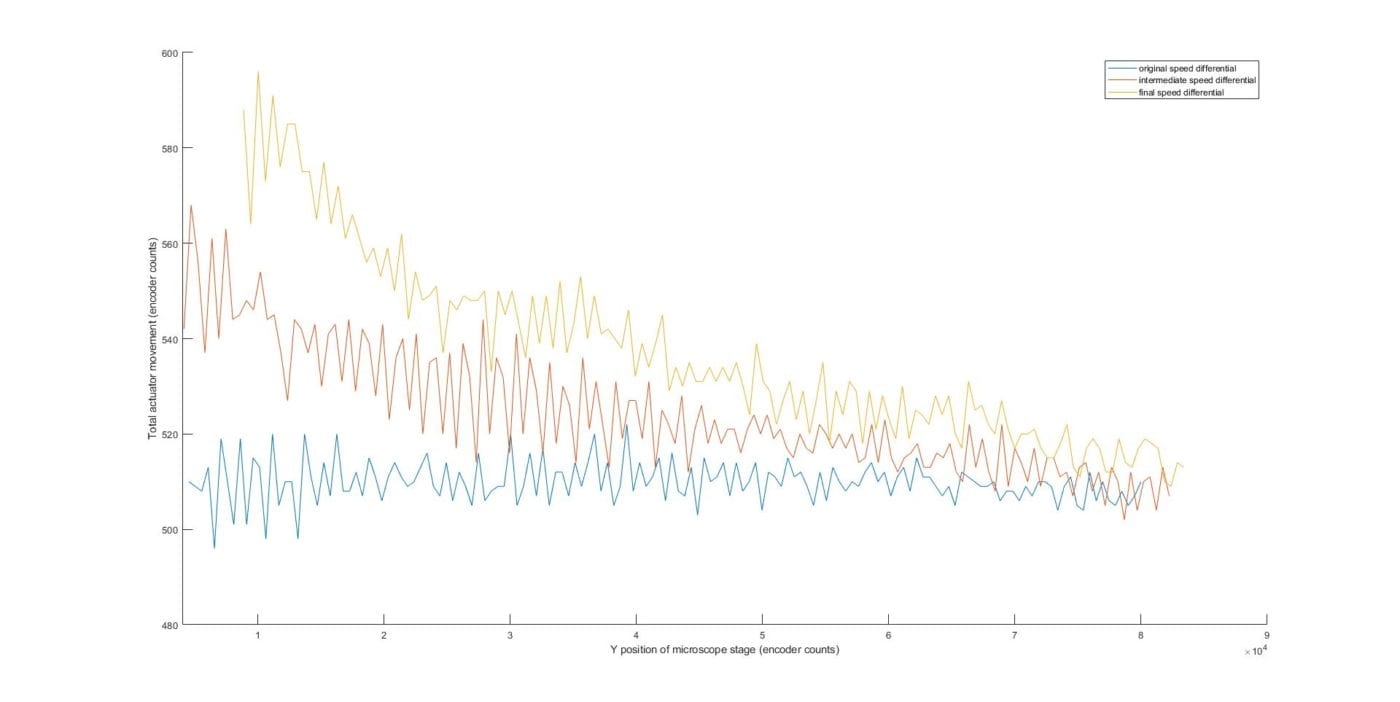
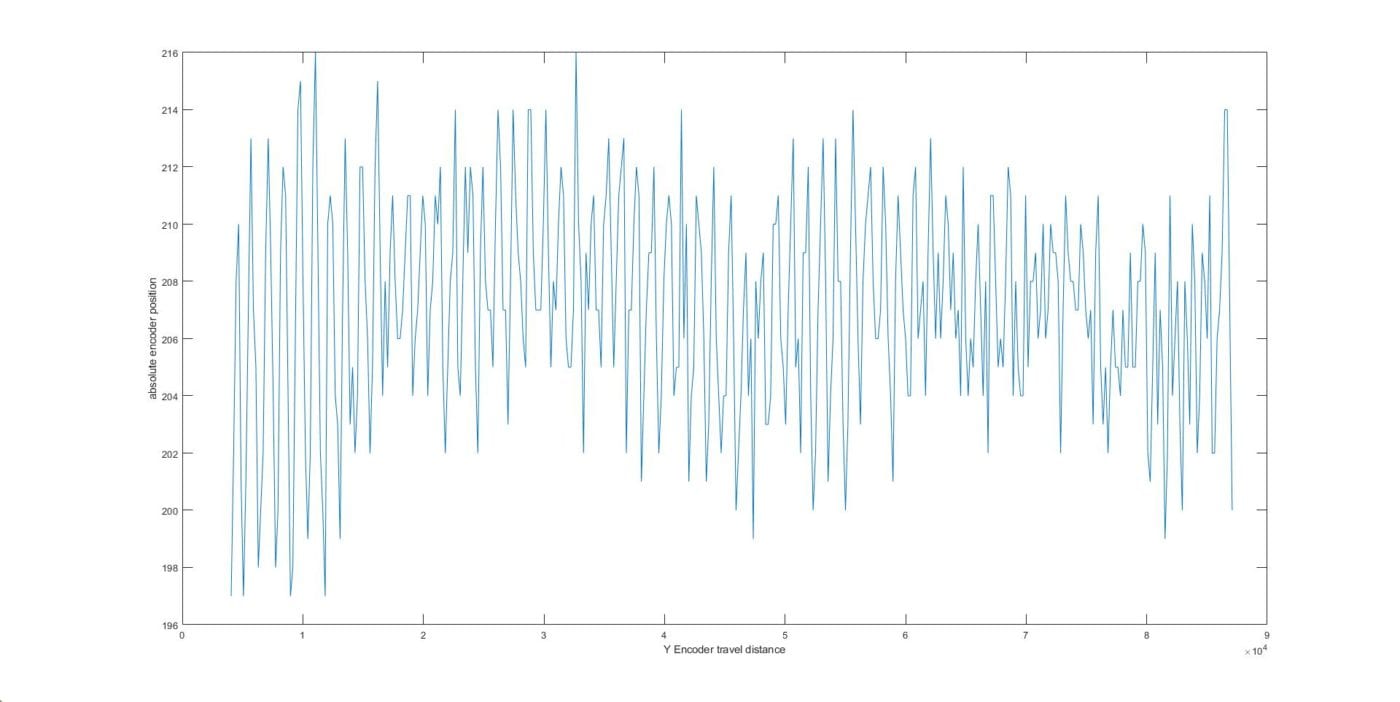
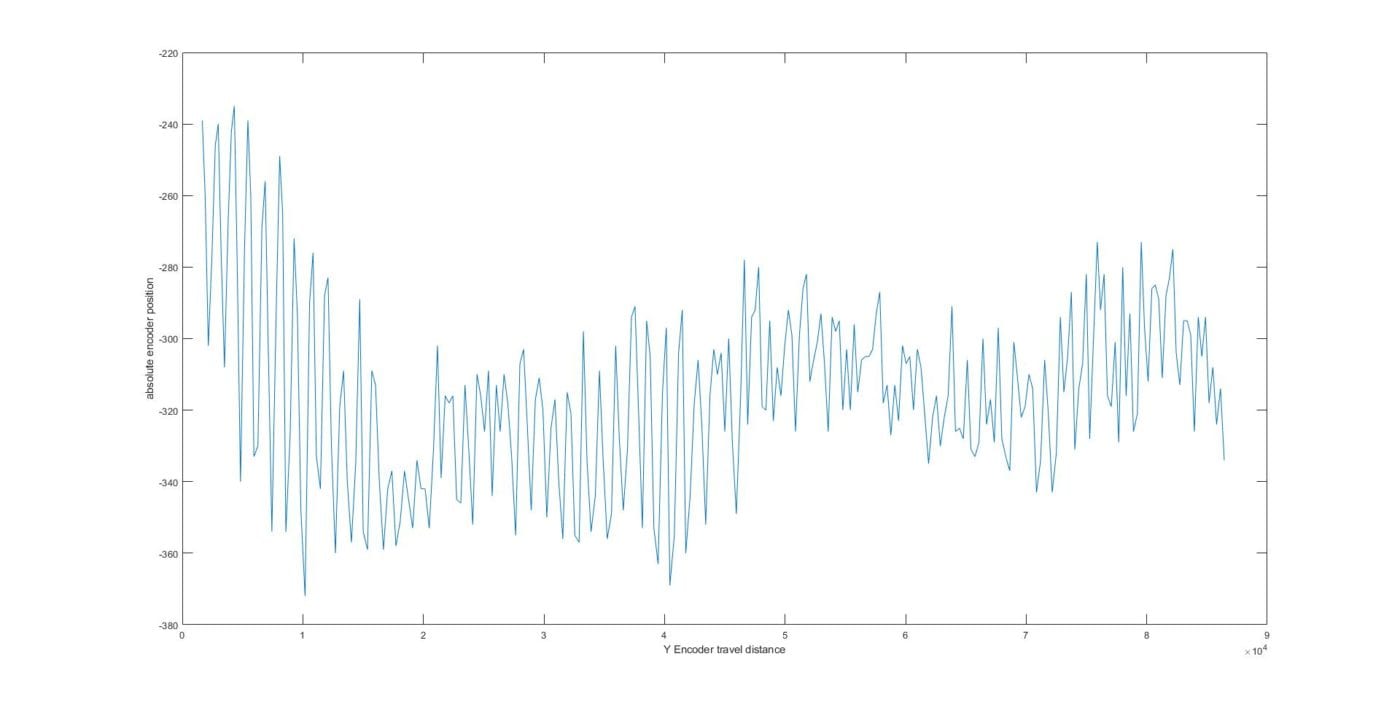
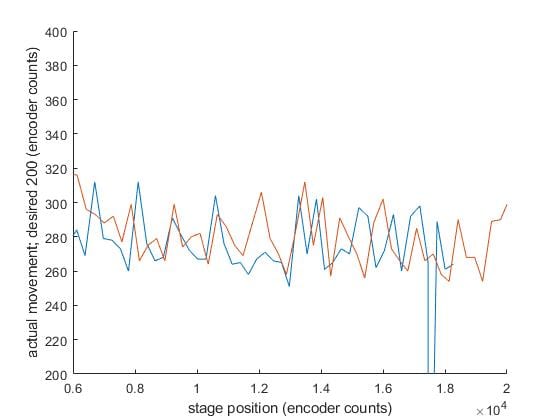
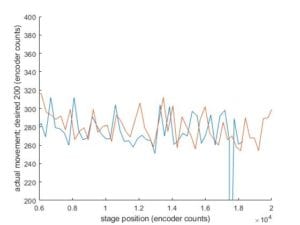 After improving the control scheme by tuning the sample rate of the encoders and the speed differential function and implementing overshoot correction the final repeatability numbers are shown below.
After improving the control scheme by tuning the sample rate of the encoders and the speed differential function and implementing overshoot correction the final repeatability numbers are shown below.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}