Ben Presley
Mechanical Engineer
Connor Sexton
Electrical Engineer
Dana Choy
Biomedical Engineer

Miles Young
Mechanical Engineer
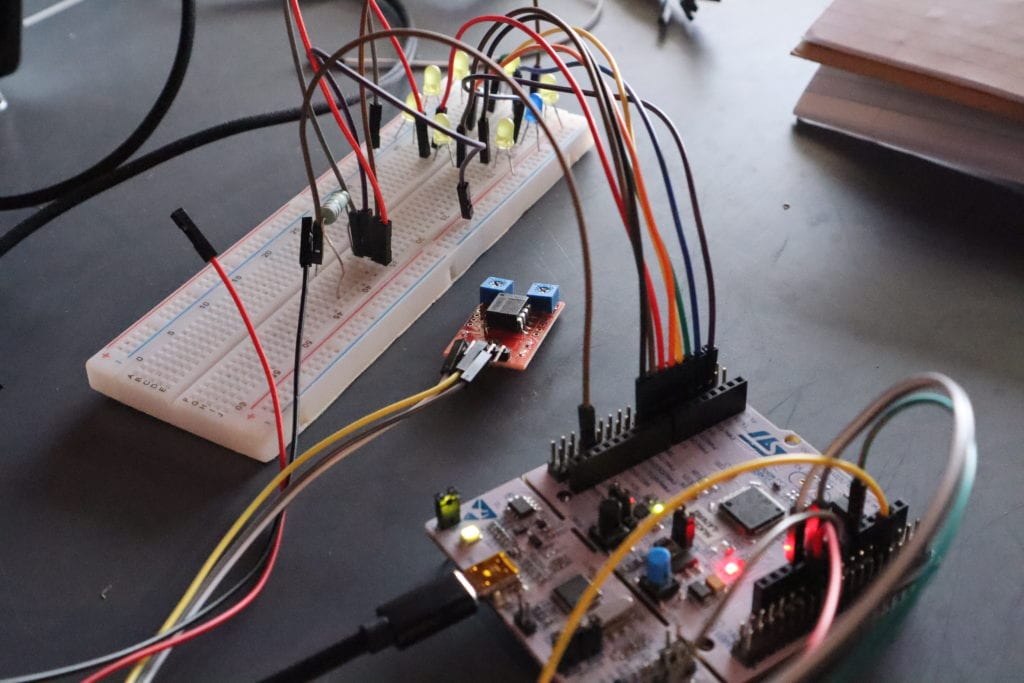
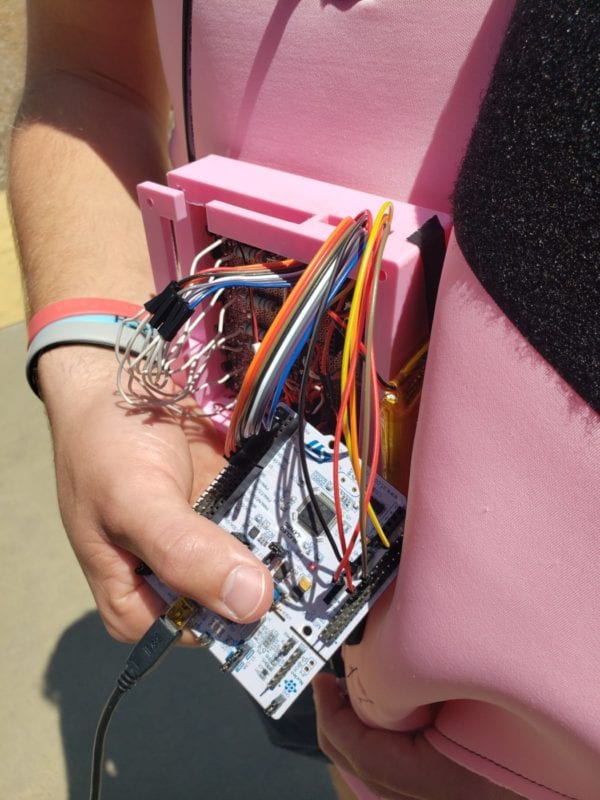
All components of the mechatronic subsystems are bought in bulk. Arduino IDE is used to onboard the software to the microcontroller. The code and device parameters can be easily loaded and changed through the microcontroller’s programming port.
Only variation between from part to part within the mechatronic system are the sensors. All sensors have linear voltage-to-degree ratio within a certain angular range, but this range varies slightly from part to part. This is an easy-to-edit parameter in the scripts. A boot-up sequence happens when the device is powered on, which runs through checks and calibrations of the sensors and motors.
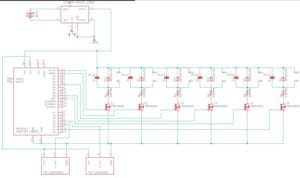
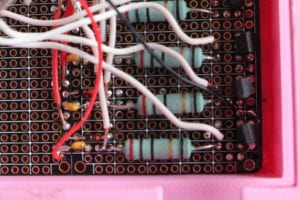
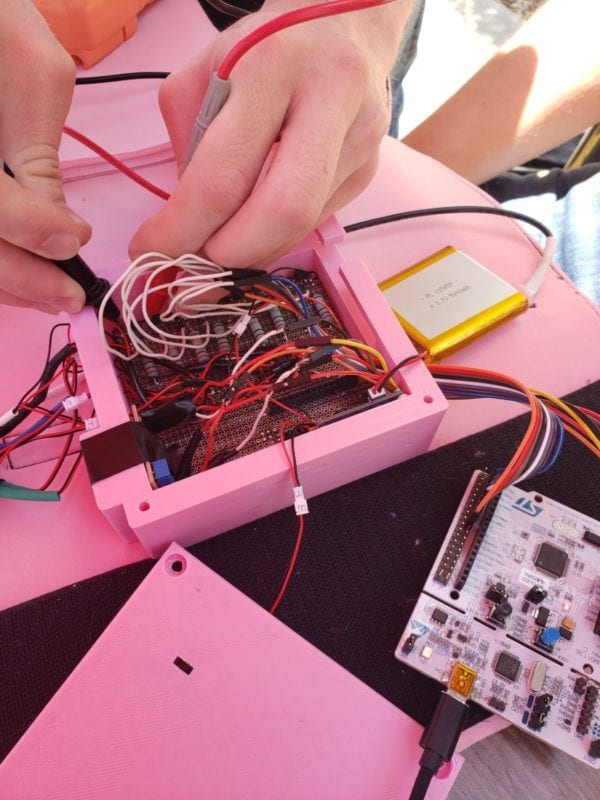
- The circuit board is soldered with standard rosin-core.
- Components that require soldering are the motor driver circuitry, the microcontroller headers, the JST connectors, and LiPo charge boost board.
- Each electrical component has similar source voltage and ground, which allows for easy soldering and circuit board production.
- Currently the top half of the Proto Board contains the six motor driver circuits where we soldered on side by side following the soldering diagram in Figure 1.
- The JST connectors is an extension to the motor so it can allow us to solder it onto the board with the motor in the soldering diagram.
- We also soldered the LiPo charging boost board onto the bottom right corner of the proto board to place it closest to the battery and to keep it close to the rest of the components that need power from it.
- Lastly, we soldered the headers on the bottom left of the Proto Board so that the MCU can be easily installed.
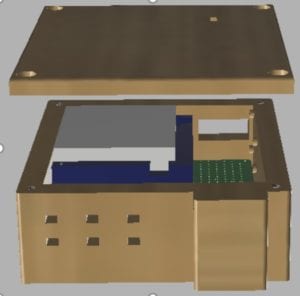
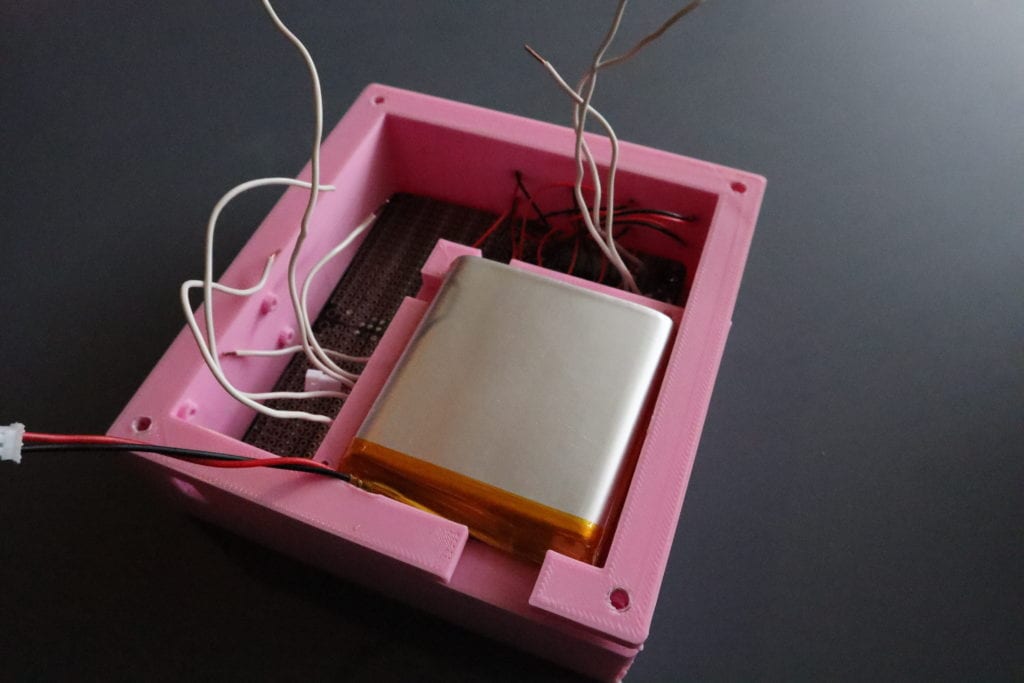
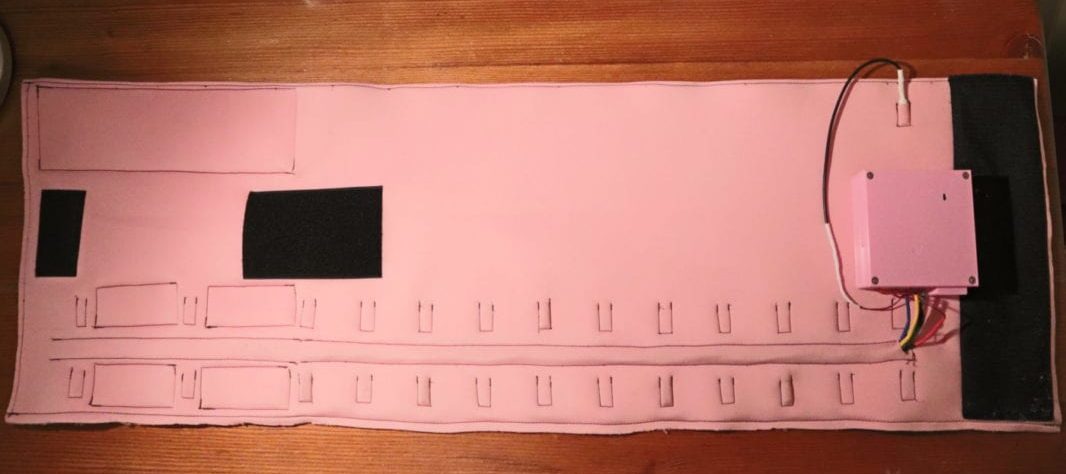
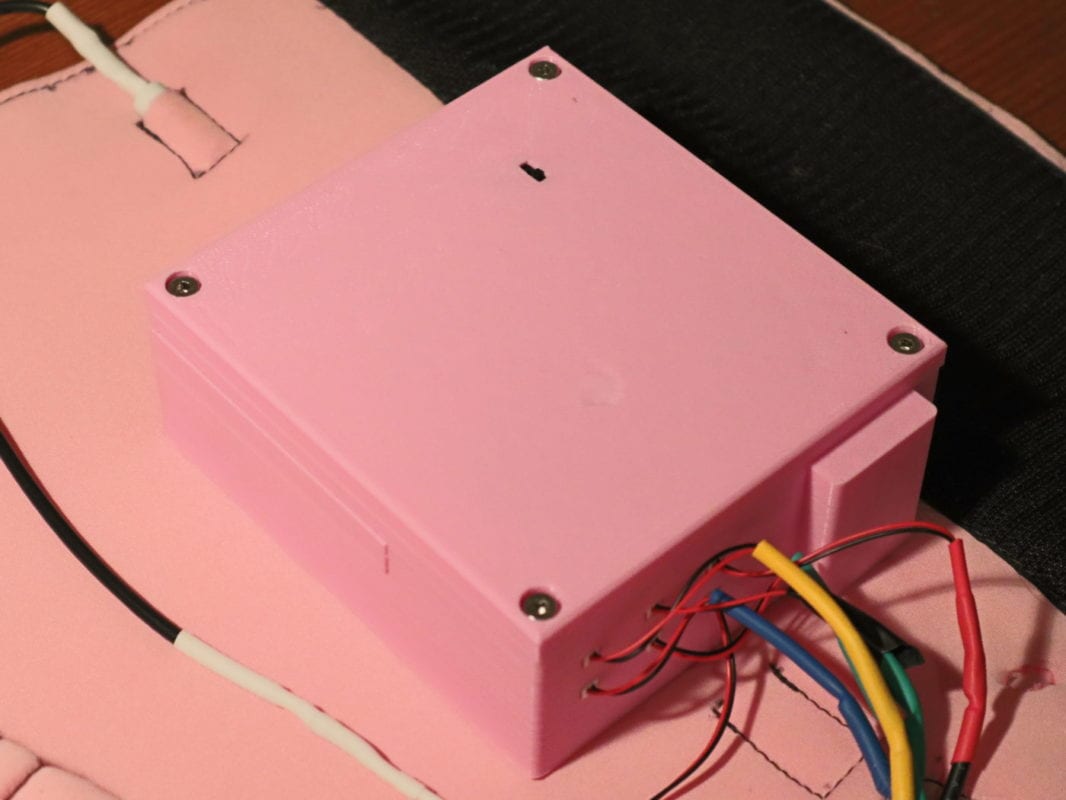
Printing the Controller/Battery Housing
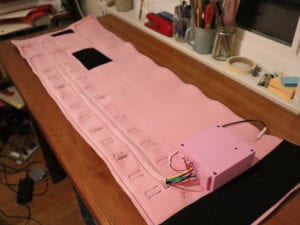
We 3D printed the housing using a standard filament printer at hyper resolution to assure the quality of our product design. The material used for the housing is polylactic acid, PLA, a typical 3D printing material. For the infill density, we set it to 20% for a general balance between weight, mechanical strength, and material costs. The wall, base, and ceiling thickness of the parts are 3mm. The M2 holes were printed as M1.6 holes and manually drilled and taped due to the inaccuracy of the 3D printer.

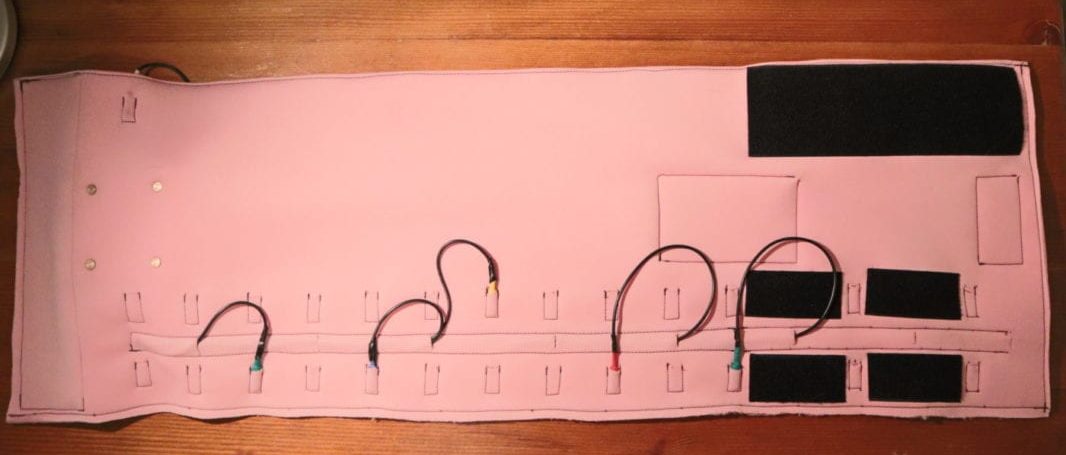
We sewed the wearable with a heavy-duty sewing machine and nylon upholstery thread. The fabric used when sewing was neoprene. We cut the fabric into a 40” x 30” sheet and had the 18 pockets and the housing pocket sown on along with the wire channels before we folded it on the short side to create a double-layered sash.






The analysis methods used for the validation testing were through ANOVA one-way post hoc Tukey test.
Standing Test Procedure
The standing test involves a series of 4 tests that is aimed to test our design against healthy individuals to see if there is any improvement in their balance while standing. The first test is to simply stand with our vest on and to let it collect the 10 seconds of lean data of an individual’s natural sway.
The second test is then implemented when we turn on our vest and collect positional lean data to see if there are any decrease in magnitude of sway as compared to test 1.
We then let the test subject use the design for 5 minutes to get use to its function and then we collect the lean data again to see if getting use to the design helps improve sway. Finally we turn of the vest and start test 4 to see if there are any residual effects of the vest on an individual.
Standing Test Analysis
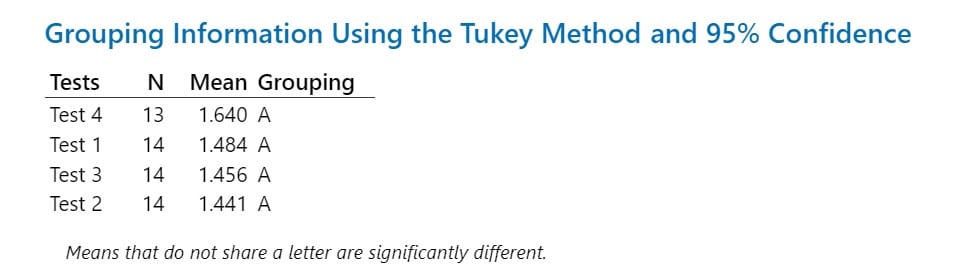
Conclusion:
Though there was no significant differences found, most individuals who did test 1 and 2 did slightly decrease in terms of their average magnitude of lean, meaning they are leaning more centered around the safe zone. This suggests that this prototype would need to be tested for a longer duration of time if we were to continue this project. For example, doing this standing test every day for a week.
Dynamic Gait Index Procedure
For this test, only individuals within our group were tested as this involved a series of test over the span of 5 days, one on each day, except for Day 2 as we did not have time to test on Day 2. The DGI procedure is from the Shirley Ryan Ability Lab, sralab.org, and was used accordingly. This test was a series of 8 mini test that were based on a point system where each test was worth 3 point and the higher the score, meant the better the walking gait of an individual.
Tests:
- Walking normally
- Change in gait speed
- Gait with horizontal head turns
- Gait with vertical head turns
- Gait and pivot turn
- Step over obstacle
- Step around obstacles
- Walking up and down stairs
Dynamic Gait Index Testing Analysis
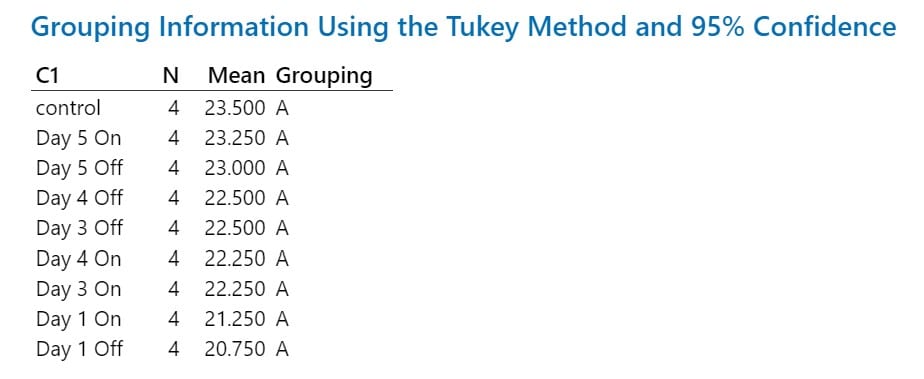
Conclusion:
Using the Dynamic Gait Index (DGI) test on individuals who artificially induced vertigo by spinning proved to be insignificant as the trials for Day 1, 3, 4, and 5 were in the same grouping as the control, where the individual did not spin and simply did the DGI test. This suggests that induced vertigo is not enough to inebriate healthy individual’s sense of balance.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}