Kevin Dixson
Embedded System Developer

Tegan Fleishman
Full Stack Developer
Darnell Gadberry
Shark Lab Systems Architect
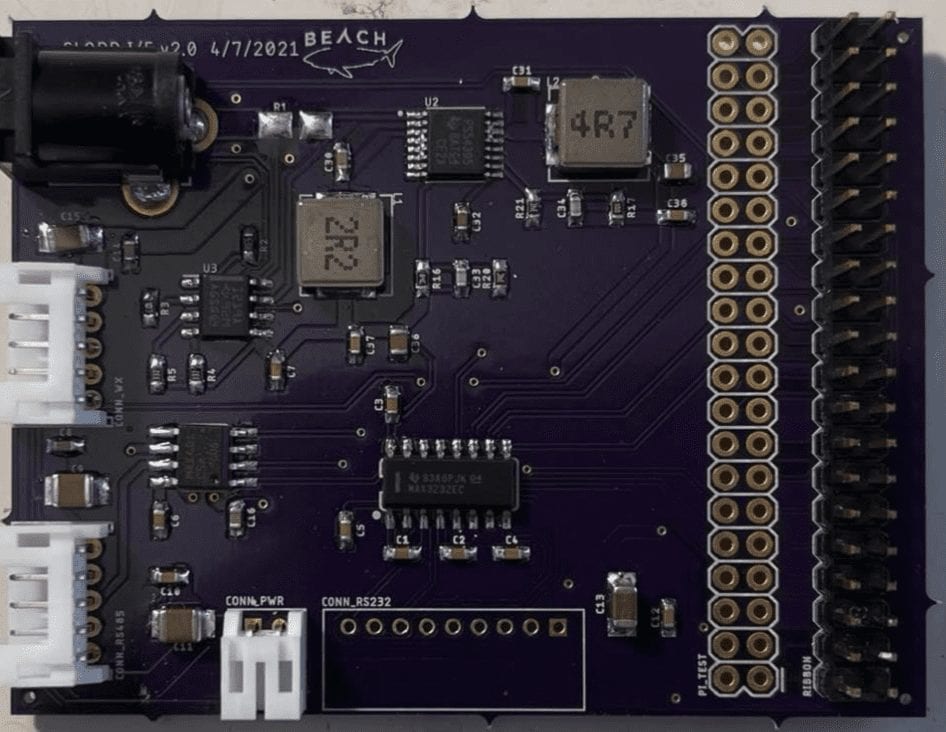
The primary computer is a Raspberry Pi 4B which collects data from the two sensors: a subsurface acoustic receiver and an atmospheric weather station. The acoustic receiver reads the water temperature, listens for nearby shark tags to pass, and uploads data to the Raspberry Pi 4. The weather station collects a wide variety of data including air temperature, GPS coordinates, acceleration, and much more. These data are regularly delivered to the Raspberry Pi 4, which packages the data and sends it to the cloud.

CSU Long Beach Shark Lab
Thank you to the CSULB Shark Lab for the incredible support and mentorship throughout this project.
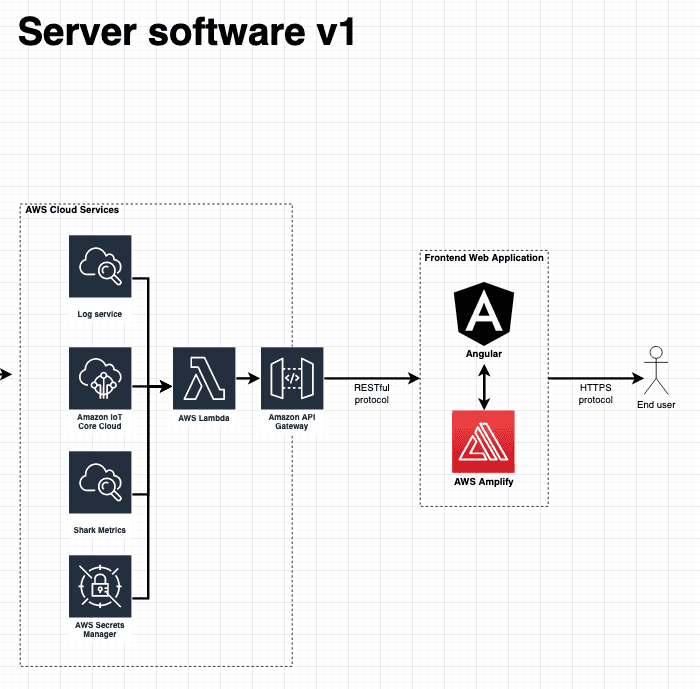
 Amazon Web Services (AWS) is a powerful cloud-based product that offers a wide range of services. From managing our fleet of buoys to delivering data for our website, AWS was a central part of our design. Not only did it allow us to spin up resources with just a few clicks, but it gives us access to state-of-the-art hardware to run very fast and scalable computations.
Amazon Web Services (AWS) is a powerful cloud-based product that offers a wide range of services. From managing our fleet of buoys to delivering data for our website, AWS was a central part of our design. Not only did it allow us to spin up resources with just a few clicks, but it gives us access to state-of-the-art hardware to run very fast and scalable computations.
‘AWS Greengrass is similar to a “hypervisor” style OS that runs all of our code onboard the buoy. The vast majority of the code running on the main computer is managed by Greengrass. For every general task, such as publishing shark detection events, there is a function invoked by the Greengrass manager upon a message’s arrival from the acoustic receiver. Once the function completes, it goes to sleep and saves power while idling.
The benefits of Greengrass are far reaching, but the most powerful ones are Over-The-Air updates, secure SSH tunnels, and easy connectivity to the AWS cloud. Specifically, when a function runs on a sensor event, we can see when it executed, if it succeeded, and what happened to the data once it completed. If the component did not succeed, then we can easily fix a bug and deploy a new version of the code in a few minutes without having to physically interact with the buoy, or even disturb other components that may be running in the background.

AWS IoT Core was leveraged to connect our IoT devices (buoys) to the AWS cloud. The service allows for two-way communication between the buoys and our server. When sensor data comes into the main computer, it gets parsed and then uploaded to the cloud via IoT Core. These messages are then available on the cloud for any of our services to read.

AWS Lambda is a “serverless compute service that lets you run code without provisioning or managing servers,” and it was instrumental in helping us scale our back-end very quickly. By using Lambda functions instead of our own hardware, we were able to perform large computations on our data at very high speeds, all over the cloud.
AWS API Gateway acts “as the front door for applications to access data, business logic, or functionality from your backend services.” We used this service to handle all data retrieval calls from our website, which in turn calls AWS Lambda and other AWS services to grab the data we need.