The hardware developed on this project was primarily to demonstrate the proof of concept for an unmanned ground vehicle capable of snow removal. The software aspect of this project was a challenge for our skillset as engineers and slightly beyond the scope of our talents as burgeoning engineering talent. Some examples of further growth are to further the initiatives of:
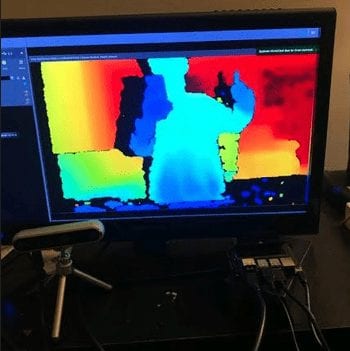
1) Stereovision with OpenCV on the NVIDIA Jetson Nano and Intel Realsense D455 as a companion computer for the Pixhawk microcontroller with to program object detection and vision odometry to navigate the robot.
2) Robot Operating System (ROS) is a robotic architecture to control the plethora of sensors and electronics onboard the robot.
3) Machine behavior for human-robot interaction with guests
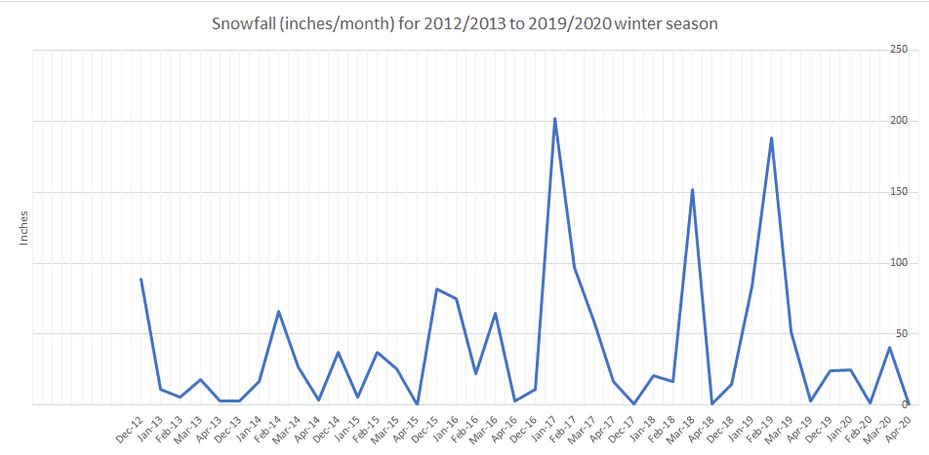
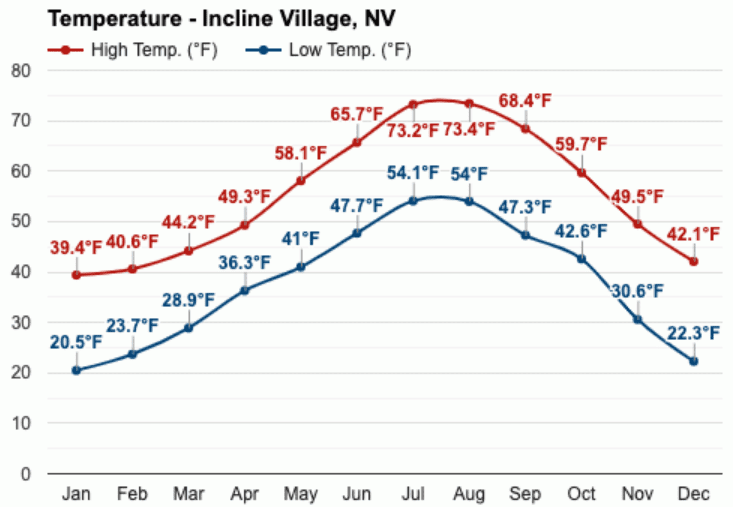
4) Weather Data API and feedback for autonomous deployment and path state reconnaissance
Cybersecurity protocols to protect the system from malware and theft
The testing of this system remains speculative given the timeframe of completion for this project. A few examples of improvements to the testing are:
Track build and material for maximum mobility in snow and low friction surfaces
Auger runtime and redesign for mechanical efficiency
The electronics need to be optimized for space savings. Wires take up a lot of space in the in design and need organization
An autonomous docking station as a home for the robot
Thermal controls for battery and camera systems


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}