Matt Lundgren
Project Leader

Adam Mayeda
Testing Lead

Dallas Rocha
Analysis Lead

Ariel Tolentino
Project Captain

peter way and rory
Project Challenger
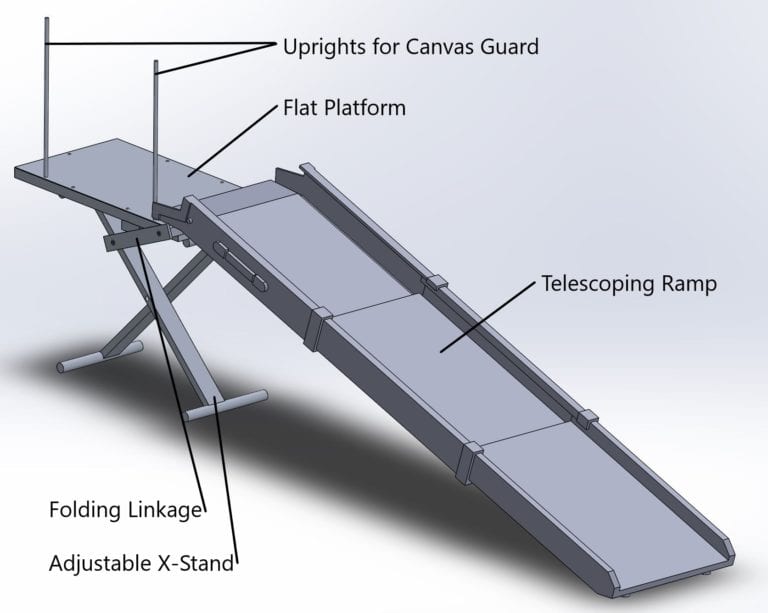
Service dog ramp
Matt Lundgren, Adam Mayeda, Dallas Rocha, Ariel Tolentino
Faculty Advisor: Dr. Brian Self








Quality of life plus
Sponsor
Project Manager: Vanessa Salas